Personal Accomplishments:
1. Presentation (6 hrs): Together with Johnny and Jason, we finished the slide deck for the design review presentation. I made the slides about testing metrics and why we chose to use radar instead of other distance-measuring equipment. During lab meeting time, I listened to other teams’ presentations, asking questions and providing feedback. I was able to hear about other people’s projects while reflecting on our project to see what can we improve in terms of hardware and software design.
2. Miscellaneous (2 hrs): I set up the team GitHub repo for version control. The link to that repo is omitted here since we are not releasing the source code yet. Johnny, Jason, and I did a quick functionality check with the screen that we purchased. I set up the hardware connection between the K-LD7 radar and the Raspberry Pi using a breadboard. This is not the final setup for our system; it is used for software bring-ups and tests that will be discussed in the next section.

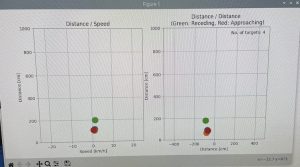
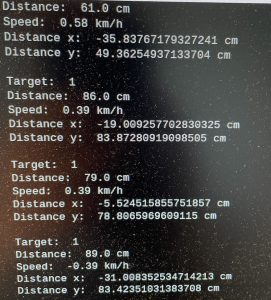
3. Radar Initialization (4 hrs): I began the software bring-up process for the K-LD7 radar. The first phase includes setting up the radar and getting some basic detection results. I did some research on how to get the radar module working with Raspberry Pi and how to get useful output. In the datasheet for K-LD7, I learned the signal processing flow of the module and different parameters such as speed/direction measurement, angle measurement, and distance measurement that we can tune. I discovered a Python API for K-LD7, which is very handy. According to a post from the Raspberry Pi form, RFBeam provided a simple testing script to test the basic functionality of the radar. The script is based on a setup with an evaluation kit. I modified the script to make it work with Raspberry Pi. However, until the time of the blog post, I have not tested the radar setup yet. This will be done before the team meets on Monday.
Progress:
I am still on schedule, but running tight on time. The radar bring-up was started this week. However, it was delayed a bit due to the later-than-scheduled arrival of the radar module. The deadline for the software bring-up is this coming Monday. However, given the current progress, I might not be able to fully test the software functionality of the module, although the basic initiation will be completed by the deadline. To solve this matter, I will prioritize solving issues related to radar software bring-up next week. We have some slack time during spring break as well, so I still have some buffer to fix any remaining issues without disrupting the main schedule. Overall, the work on the radar is still going as planned.
Next Week:
- Finish radar software bring-up
- Simple radar detection tests
- Varying parameters to see how the results change.
Deliverables: We should be able to get some serial outputs from the radar on some basic detection. The output should be displayed using pyserial. We should also have a better sense of how to use this radar module in general, and what will be our challenges in this phase.