Risk and Plans
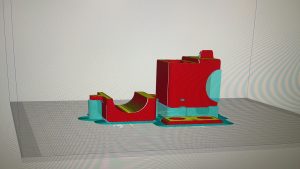
We are making good progress on the software, UI, and hardware connection of the devices. However, the biggest risk right now is the waterproof enclosure. This task was more complicated than we anticipated, and we were facing issues in finding the correct materials and the location to 3D print/laser cutting them. Although the CAD is done, the actual printing has not started, and the timeline is still unpredictable, which might easily drag us into more delays. To mitigate this, we are trying to move people around to help with this task. Originally, Johnny was taking all the load on this part of the project. However, since Jason and Jack are making some good progress, they might be able to help Johnny with this part to ramp up the speed if needed.
In addition, the risks that were discussed in last week’s report remain valid.
Changes in Design
No design changes for this week.
Schedule Updates
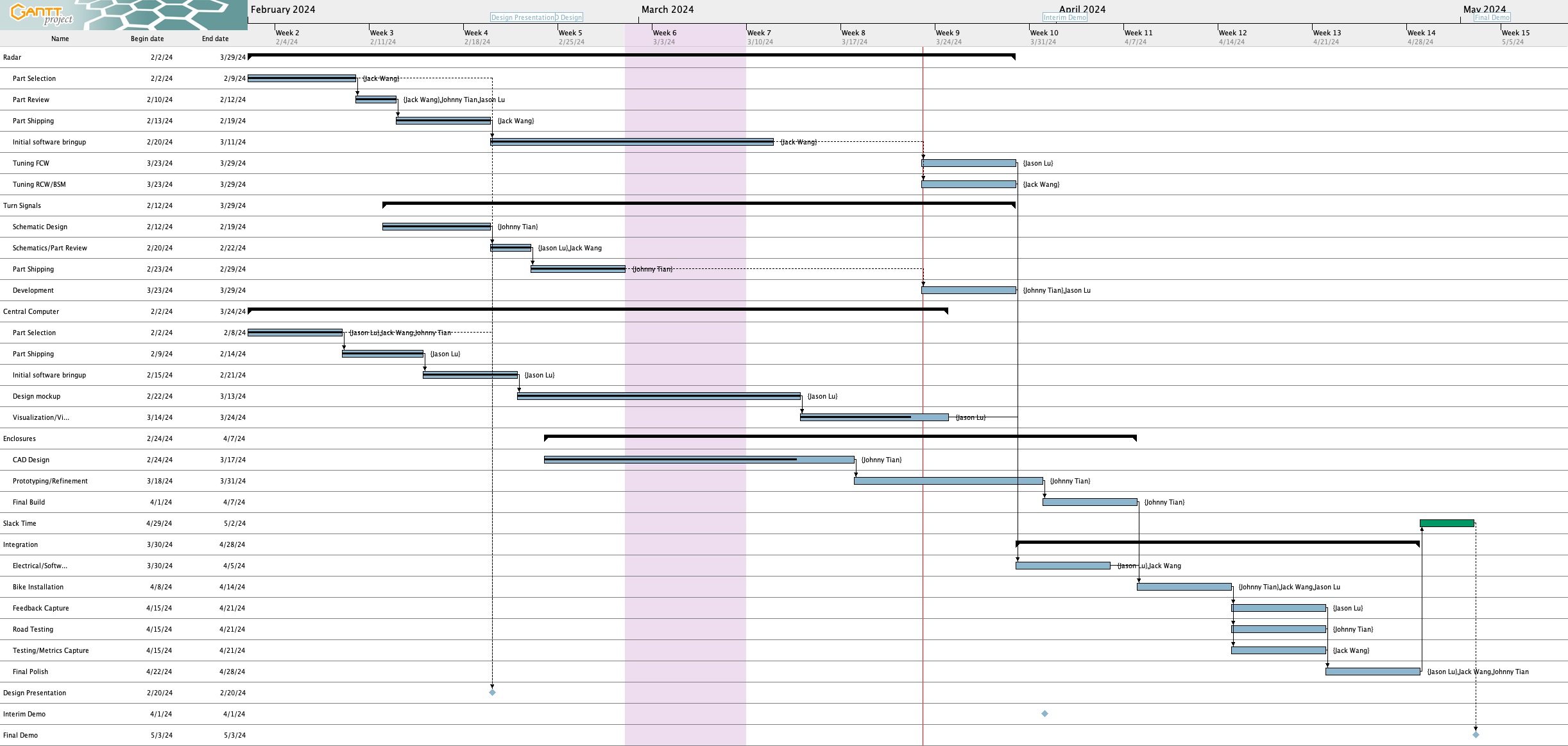
Here is an image of our updated Gantt chart for this week, although the enclosure status may be inaccurate:
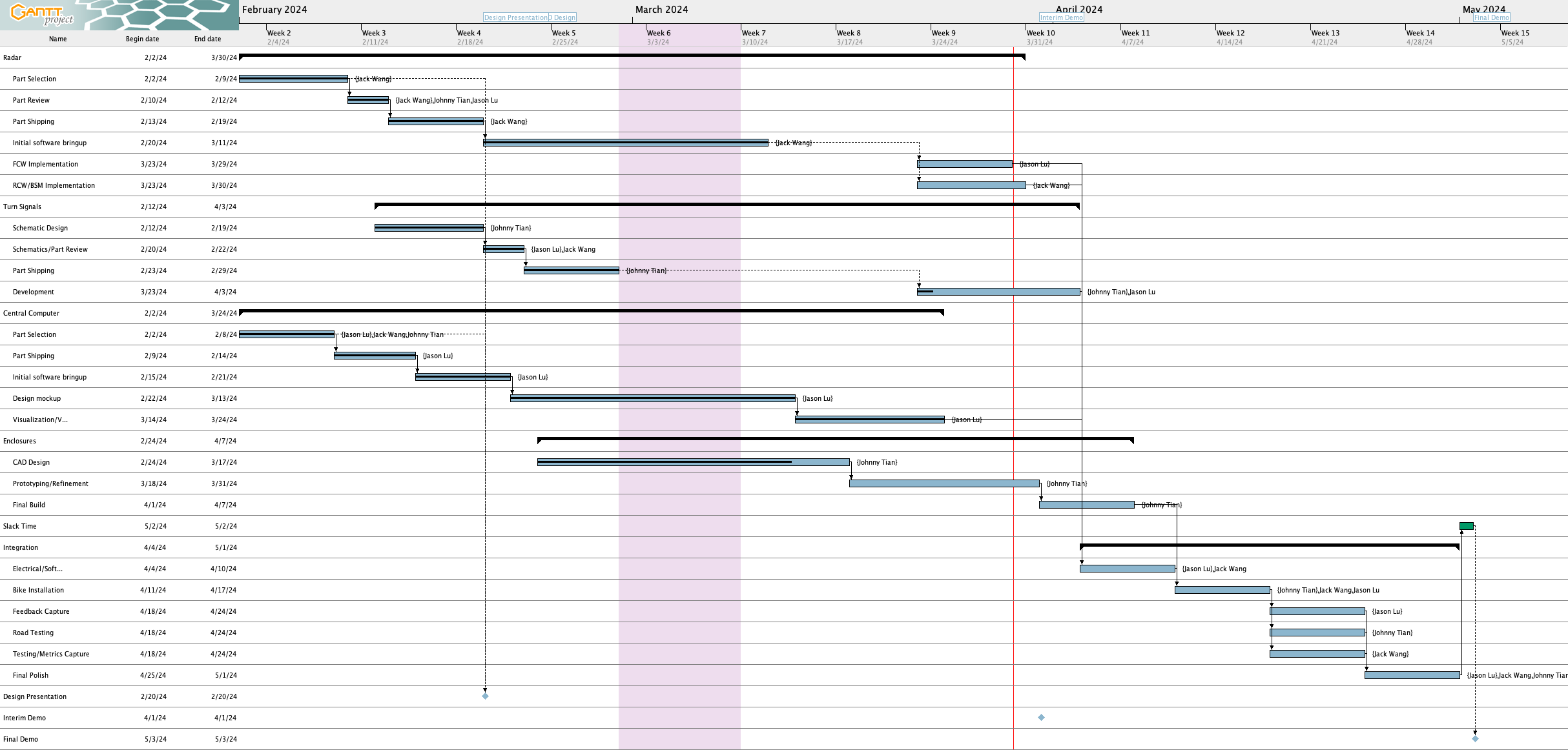
Here are the schedule updates since last week:
Completed tasks  :
:
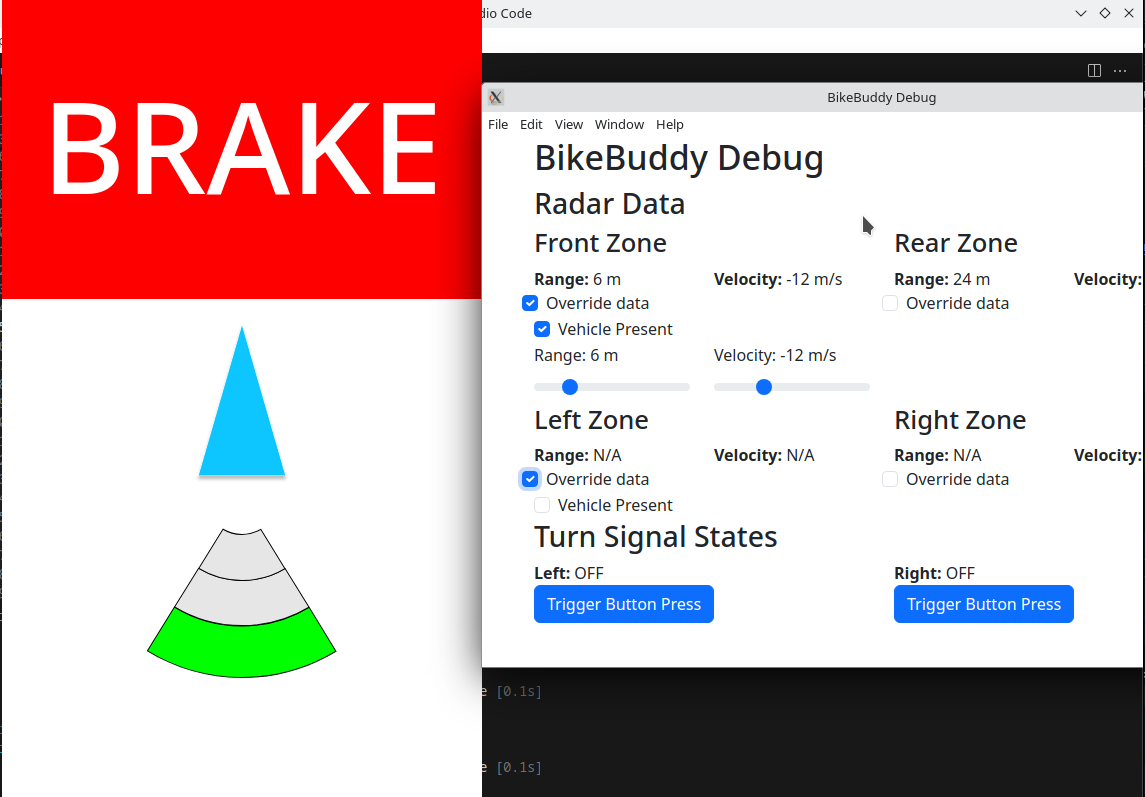
- Initial UI complete
Delayed tasks  :
:
- Radar implementation – We continue to slip on radar implementation. Note that we’ve changed the task from radar tuning to radar implementation, as at this point we’re just aiming to get the radars working (e.g., segmenting points into cars, determining lanes) instead of worrying about tuning. As of today, the RCW/BSM implementation is delayed until 3/31 (Sunday). The FCW implementation will most likely also be delayed but since we don’t have a plan yet for this it’s left on the schedule as is so its timeline is not accurate. One option is to run FCW implementation in parallel with electrical/software integration.
- Turn signal development – Turn signal development is started but is still behind, so we’ve extended the dates to the coming Wednesday. This has resulted in downstream delays in all tasks, eating into our slack time. We now have 1 day of slack time left.
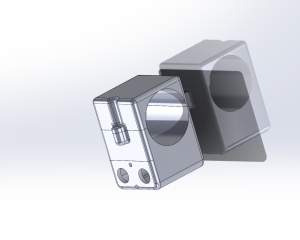
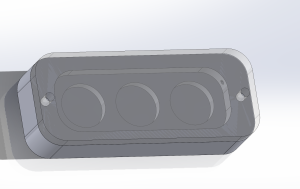
- CAD design/prototyping –