Much of my time this week was spent preparing for our demo on Monday. This involved finalizing all of the control we were able to achieve and creating demo scripts or use during our actual demo. Additionally I worked on improving the software portion of our project for the demo by speeding up how the objects were filled in. This involved creating more sophisticated code for identifying continuous horizontal regions of the code. I also changed the library used for drawing the rendered image to speed up the debugging process and created a simple debugging stroke drawing option which sacrifices accuracy for speed in order to test changes faster.
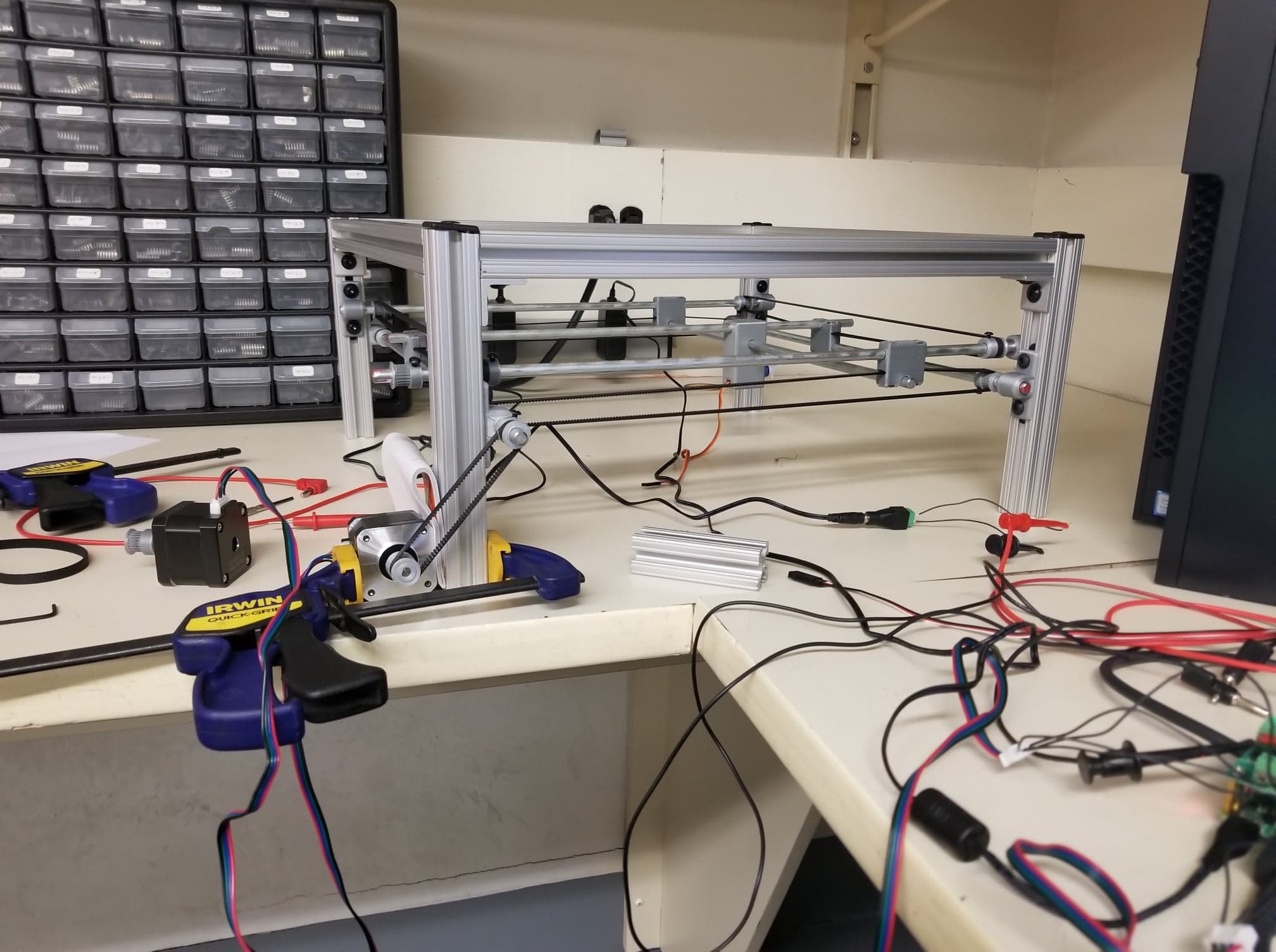
This week I was also able to begin the construction of our base board which the frame and gantry will attach to. This involved carefully measuring and cutting holes in the board for the legs of the frame to slot into. This has been completed, and the remaining work in this area is to make cutouts for the palette and water cup, as well as to attach the mounts for the stepper motors. These parts have not arrived yet, so for this reason I shifted my attention to the software components mentioned above.
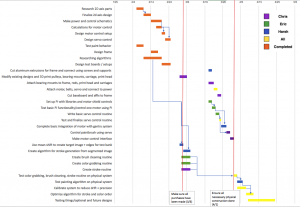
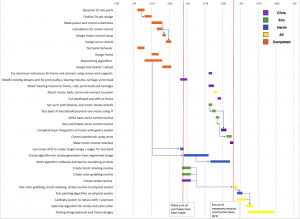
Overall my progress this week has been mostly on schedule. Ideally I would have finished the construction of the base board this week, but as this was not possible due to the missing parts I was able to shift my focus to the other portions of the project and assist Eric and Harsh where needed. Next week I hope to finish construction of the baseboard and we can move on to more extensive testing of our physical system.