I finished the inside of the vest.
Figure 1: The inside of the back of the vest. All wiring and pockets completed.
Carnegie Mellon University: ECE Capstone Spring 2023 | Amelia L. Bethel Y. Sophia L.
I finished the inside of the vest.
Figure 1: The inside of the back of the vest. All wiring and pockets completed.
What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
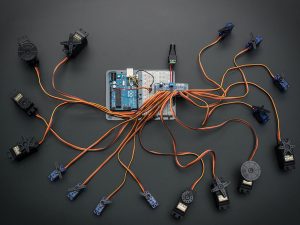
I’ve done a lot. I’ve completed most of the physical design of the suit in the past two weeks. This included a lot of sewing of the motor system velcro pieces into the front part of the vest. Frankly, this took way too long as the sewing machine didn’t always work. But it was something that had to be done and was a good filler while I waited for the rest of the PCBs to arrive. Once the PCBs arrived, I used solder paste and assembled 16 more sets to be used in the vest and as backups with some help from Amelia and Bethel. Then I went ahead and wired the 8 motor systems for the front of the vest and wired the lights into the vest. Then I fixed some motor functions to update them to some wiring changes I made.
Throughout this process, I continually tested each step to ensure that an issue on one motor system didn’t propagate to the whole vest. When learning how to use solder paste, I finished one PCB and tested it to ensure I did it correctly. After soldering all the PCBs I tested each and removed the ones that didn’t work for debugging later. Finally, I tested the motor functions before putting any motors into the vest. These steps of validation helped me remove any uncertainties and harder debugging later in the process.
Figure 1: All the PCBs soldered and sewed into their rubber mounting plates
Figure 2: Example of the inside of the vest
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
I think we can get our project done. I’m a bit behind schedule as I need to add the velcro for the motor system holders to the back of the vest. I didn’t do it before now because 1) I wanted to get at least the front of the vest working so we could test integration and 2) I have come to hate the time sink that swing is for this project.
What deliverables do you hope to complete in the next week?
I will help Amelia debug why the lights don’t work in the vest. I will sew all the motor systems into the back of the vest. I will update the motor algorithms to handle the new motors in the back.
What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
I was able to start assembling the PCBs and start testing them. The PCBs and parts arrived Wednesday, which wasn’t in time to use them for the interim demo, but I was able to start testing them afterwards. On Wednesday, I put together one motor system and verified that it worked as intended. With the PCB assembled, Amelia was then able to size and laser cut the final motor system holders out of the final rubber material. After putting together the rest of the 5 PCBs I had on hand, I mounted one PCB to the motor system. Along with the laser cut fabric pockets, we now have our final vest assembly components.
To move forward with the final vest assembly, I am also in charge of reversing the zipper on the best as we turned the vest inside out for our project. I was able to test removing and sewing the vest on the demo vest.
Figure 1: Soldered PCBs
Figure 2: The final motor system assembly
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
I would like to be further ahead on testing in order to receive more user feedback, but I am currently on schedule to finish my project.
What deliverables do you hope to complete in the next week?
I hope that the rest of the PCBs will come in late next week. For early in the week, I will work on vest assembly and hope to reverse the zipper on the final vest, install the fabric pockets for the motor systems, and begin the final wiring if the rainbow ribbon cable comes in time.
Now that you are entering into the verification and validation phase of your project, provide a comprehensive update on what tests you have you run or are planning to run. In particular, how will you analyze the anticipated measured results to verify your contribution to the project meets the engineering design requirements or the use case requirements?
For validation, I plan to check the technical side of the motors as well as collect some user data for the sensations of the motors. For the technical checks, I need to determine how quickly different responses will take to run and how to make them differentiable. This ties into the use case requirements of allowing for 10+ responses per minute and providing unique feedback patterns. Currently, I need to do a bit more work before I collect user input. I will position the motor system pockets and then ask for user feedback on the motor sensations. With only five PCBs currently, I will most likely have to rotate the motors test test the sensations for different parts of the torso.
I finished the PCB and submitted the order for printing as well as the order for the necessary parts. I went through many iterations of the PCB with lots of help from Professor Fedder and Omkar. I was able to learn how to choose different parts for the PCB and check on Digikey for those parts in the specified packaging and requirements. I worked with Amelia to design the PCB to fit into the laser cut patterns she is making to hold each motor system. The length of the board takes up the length of the two motors while allowing a minimal width of the PCB. Finally, I submitted the PCB fabrication design on JLCPCB and the parts list on Digikey. I also met with Amelia and Bethel Friday and Saturday to discuss and begin implementing our individual contributions.
I am on schedule. The PCB hadn’t fully incorporated itself into the schedule so I did free some time up by delaying when I will upgrade my motor control algorithm. The current mindset for last week and next week has been on creating everything semi-functional for the interim demo. The current motor control is a bit clunky code-wise but the outcome is sufficient to show a working demo. I was able to work on control more today and plan to continue to refine it in between the critical tasks would keep the project from moving
I hope the PCB board and parts will come in early next week so that I have time to solder and test them. This way we are able to produce strong vibration feedback for the interim demo. If the PCB comes in later in the week I will have time to work on my code and integration with Bethel and Amelia to prepare for the demo.
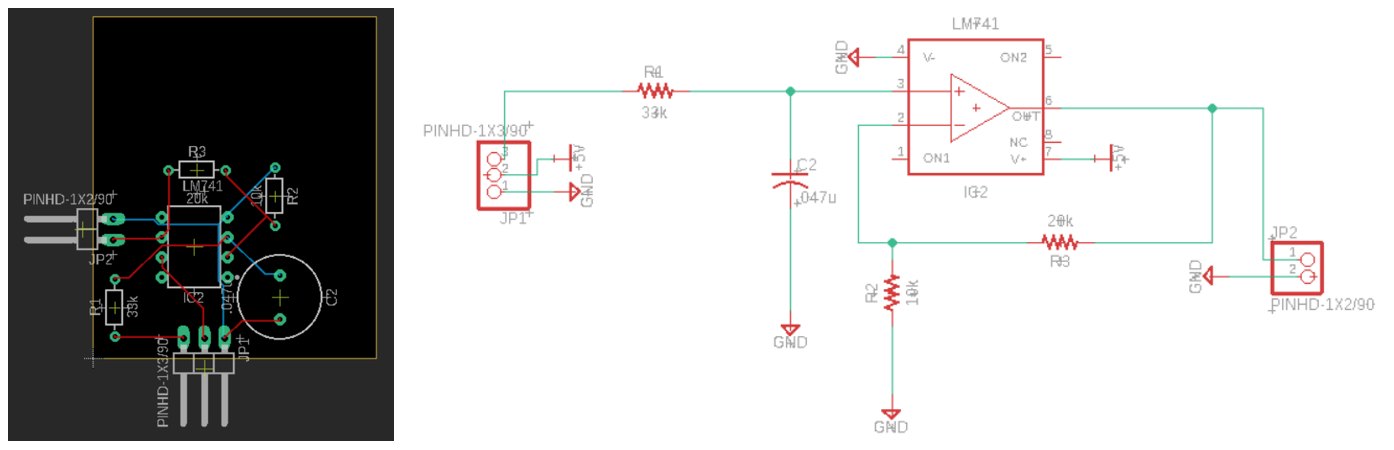
Figure 1: The PCB wiring diagram
Figure 2: The PCB part layout
Figure 3: The PCB 3D rendering
Figure 4: PCB fabrication design
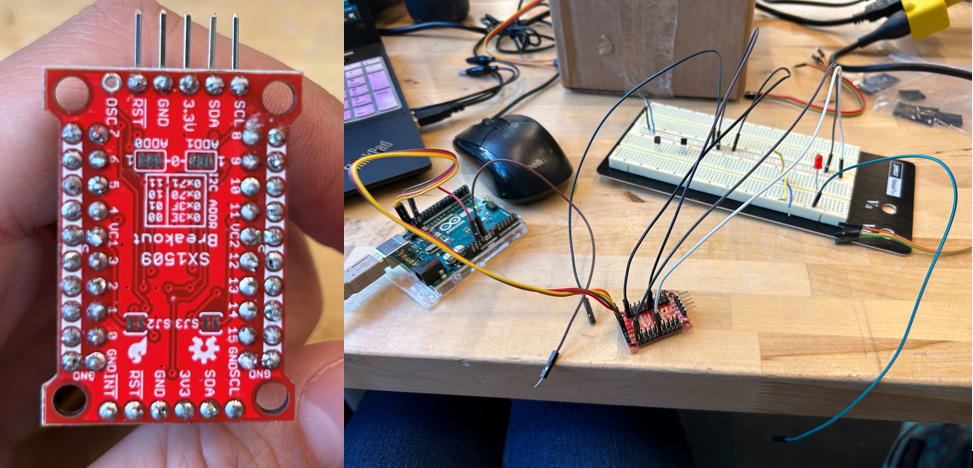
This week I tested out a different option for our I2C motor system driver. The new board I tested was the SparkFun 16 Output I/O Expander Breakout – SX1509. The voltage level and current were lower than the Adafruit servo driver, but this board only needed two wires to run a PWM device. However, through testing, I found that the Adafruit device provided a better option as a motor system driver.
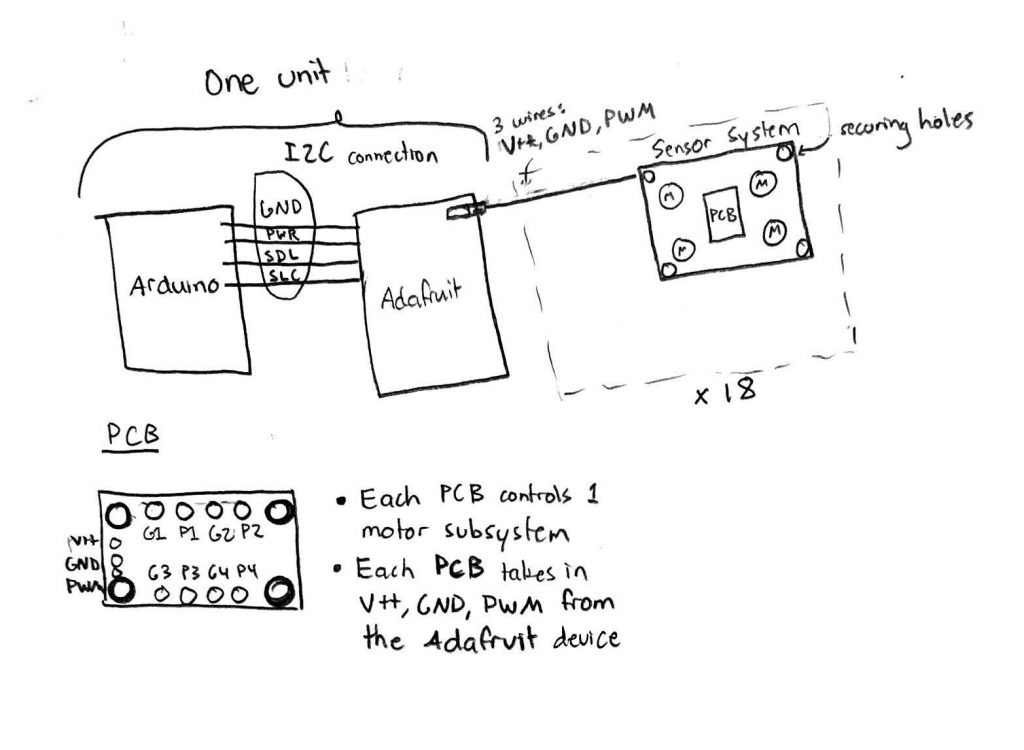
After deciding on a motor system driver, I was finally able to begin a PCB design which would take the PWM signal, V+, and GND from each motor driver output of the Adafruit device and transform that PWM into a voltage level to drive each motor in the motor system. In the original drawing, the plan was to have up to 4 outputs for the possible 4 motors each motor system would run. Amelia then brought up that we might be able to get around this by soldering the ends of the motors together so the PCB would only need one variable V+ output and GND output for the motors. The final design will have the Arduino and Adafruit device close together on the vest. Because these two devices take up the most room (header pins facing outwards), this will limit the bulkiness in the overall vest design. There will then be 16 sets of PWM, V+, GND pins coming out of the Adafruit device going to 16 of the 18 motor subsystems.
I found a basic PWM to DC voltage conversion online (https://www.egr.msu.edu/classes/ece480/capstone/spring15/group10/Application%20Notes/Kyle.pdf) and began to implement it in Fusion 360 to get a feeling for the tool. I was able to implement the design and discuss with Amelia what the best layout for the PCB would be.
On Sunday, I plan to do some circuit analysis on the current PWM to DC voltage converter. I plan to research which opamp will fit the project the best and go through the problem to figure out the other parts we should need. I will also continue to work on the motor code which I deviated from this week in order to focus on the PCB design.
I hope to check with Professor Fedder and Omkar on the PCB design before sending out an order. I will then have to go onto DigiKey or a similar website to order the opamps, resistors, capacitors, and other components for the PCB.
What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
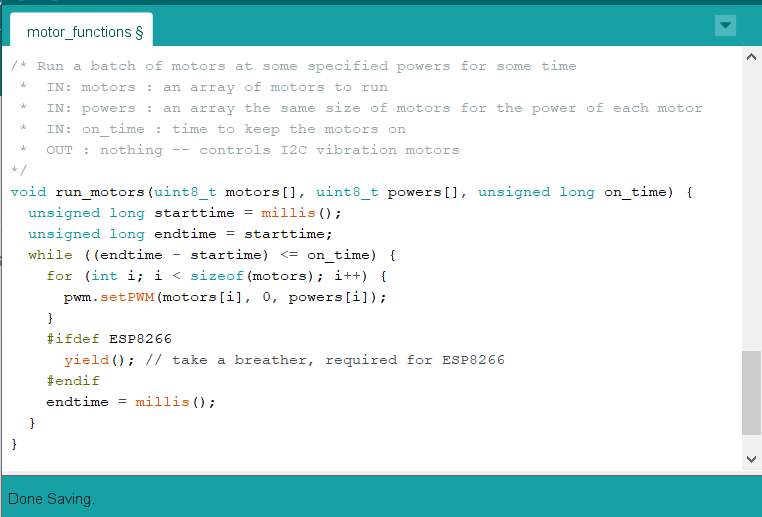
I personally accomplished creating a function that can take in a 2D array of motor pins, 2D array of motor powers, array of timings, and array of pauses. This function can then drive the motors in the given pattern set by the inputs. This is all in the team GitHub under mutlipl_wave.io. It’s print statements are not cleaned up because I’m still probably going to use those with testing further on. I also started to make a Response class which will hold all the motor info so you can just tell the class to “run_response” and have the response you want happen. I started setting up the .cpp and .h files in “BasicDesign” but it’s not functional yet. Lastly, I did some math for what I would need for a PCB to take in 3-wire PWM and make it 2-wire PWM, but I forgot to take a picture of it and don’t have it on hand. Lastly, I also worked on the project report this week.
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
I am on schedule for what I had planned. However, I had assumed the motors would run properly so that’s a parallel task I’m working on in addition to what I have on the schedule for myself.
I have decided to exchange the Adafruit PWM servo driver for a Sparkfun I/O expander. The expander can do digital, analog, and PWM writes. The one thing I’m unsure of is if it can supply 5V. The device is rated for working up to 5.5V but it has 3.6V operating power. Anyways, it only costs $7, $15 with shipping. I figure I can pick it up when I get back from vacation on Friday, try it out, and then see if I need to come up with the PCB that I talked about last week. And I’ll still be on schedule because I didn’t plan anything for this week.
What deliverables do you hope to complete in the next week?
Absolutely nothing. This is the last thing I am doing before I’m fully on vacation. Once I’m done, I’m checked out. Anything productive will happen when I’m on a beach, soaking up sun and possibly thinking about what I may want to do when I get back.
But the week after, I plan to test the Sparkfun I/O expander. If it worked better than the Adafruit device, I will edit my current code to include it. I also plan to continue to turn the functions to run the motors into a class.
What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
This week I focused on testing the Arduino to vibration motor system. After playing with the Adafruit GitHub code for the servo driver, I found a way to turn the vibration motors on and off. This was difficult because, as I found while testing, most of the servo driver examples weren’t configured to turn one output on and off, and they never turned on the output long enough for me to see the vibration motor in action. Creating the code and functions to turn the motor on and off led me to realize that I could not connect the motors in the same way I could when connecting them to an Arduino output.
This is because the Arduino supplies enough current (10-15 mA maybe, I forget at the movement and don’t have the parts with me) to make the motors vibrate and the necessary frequency for a solid feedback. However, the servo driver has the GND, V+, and PWM pins. While connecting the vibration motor provides enough current (~8 mA) to sufficiently turn the motor on, the PWM pins provide just current (~0.2 mA, I think) for a 3-wire PWM device to read the voltage level and convert that into how much voltage to draw from the V+ pin. With the vibration motor’s two pins and the PWM’s lack of sufficient current, a new solution is needed to drive the motors.
Link to video of motor vibrating
I have come up with a 2-path approach to solve the problem while limiting the impact to the schedule and our plan. The first path is to research how to either 1) drive a 2-wire PWM device from the 3-wire system, 2) “amp” up the current (I’m tired but check out my fun ECE pun…) of the PWM pin, or 3) create a custom PCB to accomplish the first research avenue if that avenue isn’t readily available. The second path is that while I am researching, I can also test and build up my code to run the motors. I don’t need the motors to work perfectly to see if I can properly create a class which can run specific waves of motors at a time for each unique haptic response. For the first path, a fully custom PCB that connects to the Arduino I2C and outputs PWM on two pins would be ideal and maybe I will try to design one if I have time at the end. However, I do not have the amount of experience necessary to design a communication protocol and do not want that to become a time drain when there is another way to accomplish my task.
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
My progress was on schedule this week. I was successfully able to debug why the vibration motors weren’t turning on. From that, I also created some functions to turn on specific motors for a specified amount of time. For my future schedule, I will be a bit packed before spring break. I believe I will end up making the custom PCB so I need to alter my schedule to make time for that.
What deliverables do you hope to complete in the next week?
I hope to design a PCB to either increase current from one input to an output, or design a PCB to do similar level checking as 3-pin PWM devices to output a correct current and voltage.
Last week I planned to focus on creating the motor control algorithm due to the uncertainty of getting parts in. On Monday, along with working on our block diagrams and user survey on our physical input system, I worked on my motor control algorithm. This included looking into how the Adafruit I2C device would control the outputs and also how to create classes in Arduino. Amelia was able to test a vibration motor with the Arduino and found it worked with the Arduino’s PWM pin with sufficient vibrational feedback. Testing the motors further would have to wait for the servo driver.
Algorithm: The main issue I found with creating the Response class in Arduino is that I need to come up with a way to make variable sized arrays. The arrays will hold which motors I want to activate for each “wave” of a haptic response. I figure I can either initialize longer arrays that I’ll need then be required to fill with -1’s for the unused indexes, or I can create some sort of variable length char array. Hardcoding various haptic patterns is also an option, but I’d like to make something more variable. However, for initial testing purposes, hardcoding to ensure the variable sized array isn’t causing a bug might be a good starting point. This left me at a point where I would have to know more about the I2C device to successfully use the functions.

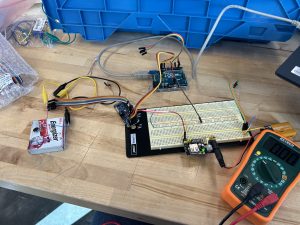
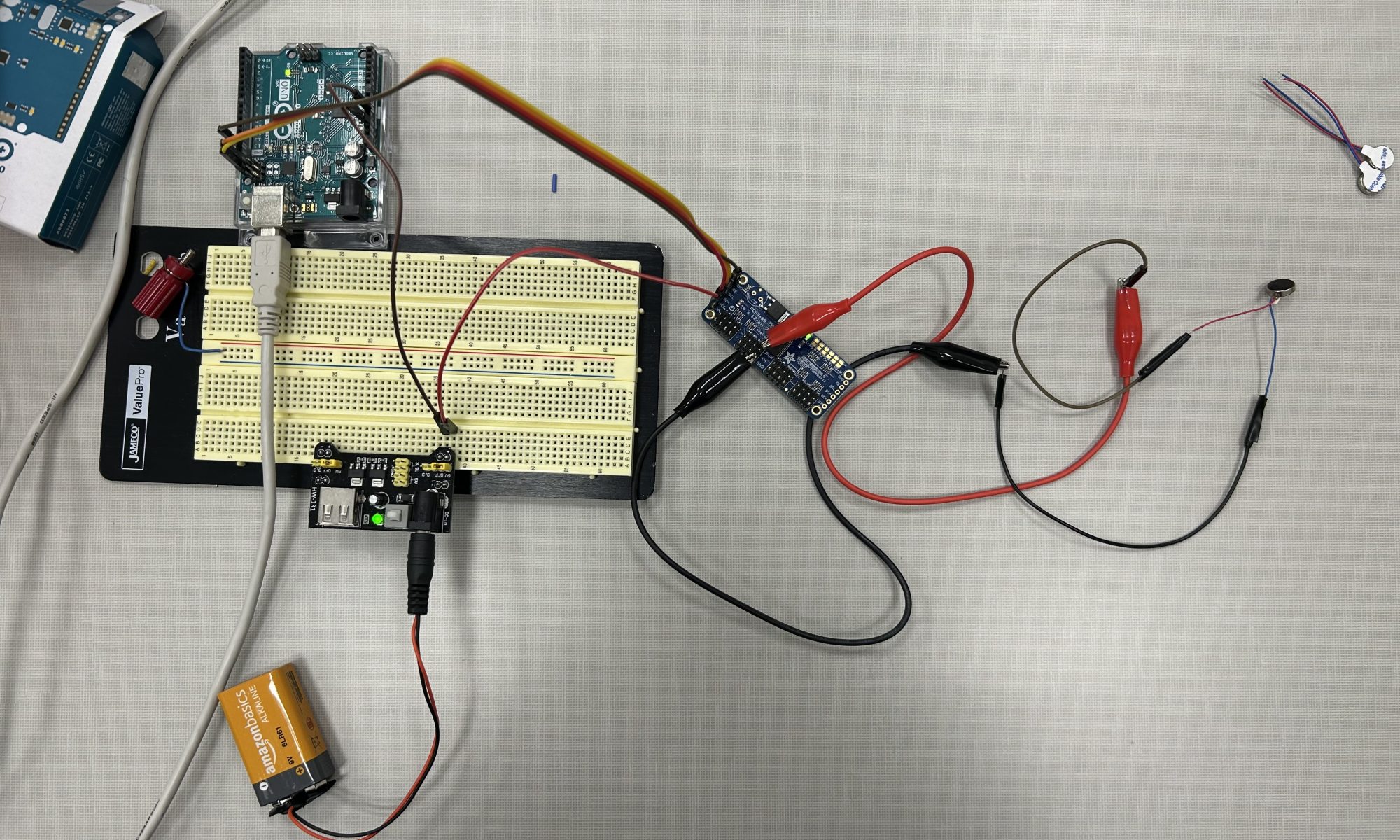
Soldering and I2C: Thankfully and unexpectedly, the I2C servo driver and the motors came in on Tuesday. This allowed me to spend Wednesday relearning how to solder so I could solder the header pins onto the servo driver PCB. This, along with doing some tasks with my team, took most of the class. I ended up finishing the soldering on Friday. I then proceeded to test the vibration motors when they are connected to the I2C device. I did come across some minor issues using the I2C device: the motors don’t seem to run. I used my good old 18-100 debugging circuit skills to try to figure out what was going wrong. The device is set up so there are the GND, SLC, SDA, and VCC pins coming in from the Arduino which provide the signals for the device. Then there is a V+ pin which is connected to a different 5V power supply to supply voltage to the motors. I was able to wire up the I2C device so when I run code to turn on and off an output, you can measure the changing voltage with a multimeter. And I also had some basic servo motors from 18-100 which did move when the code was run. However, the small vibration motors–despite me being able to read a voltage up to 5V from the PWM to GND pins–did not buzz.

Other Stuff: I also worked with Amelia and Bethel on our Design Report presentation. (Saturday night update: a lot. We worked on the design report presentation a lot). The design report required multiple schematics and wiring diagrams that took a while to design.
I am currently on schedule. With the change with the physical input device, my schedule has changed a bit, but my two main tasks of creating the motor algorithm and driving the motors from the servo driver are still on schedule. Although I am going to switch up my schedule because I want to get the motors working properly before moving forward with the algorithm. I believe this will allow me to better understand what functions and parameters the algorithm needs to control.
Next week is pretty busy for me in most of my classes, but I plan to have some basic working code so specific motors can be signaled to turn on and off given some power and time_on values. This requires me to debug why the power I’m providing to the motors does not cause them to vibrate. Once I have basic function to run one motor, I can easily add them to an class function in Arduino so I can run multiple motors at the same time and in a specific pattern.
I used 18-100 and 18-220 for the principles on how to set up I2C connections and debug circuits. These classes allowed me to design my system so the ground from the I2C power source was connected to the ground of the Arduino. This is required so they are in the same circuit and weird different-circuit errors don’t occur. I also believe 18-100 had a soldering lesson freshman year so that helped me with soldering the header pins onto the servo drive PCB this week. I’m also using 15-112 principles for designing my algorithm and creating a class in C++. I think the reason I’m using all my freshman year courses is because it is in those classes I learned the basics of engineering which can be generalized a lot easier than later courses. A lot of my later courses allowed me to improve upon those generalized skills while specializing in other areas. However, most of those specialized skills may not come into play with this project, hence the focus on earlier classes.
What I did this week:
I spent this week researching what advantage the STM Nucleo boards give us so we don’t end up buying something we won’t benefit from. It turns out that the board will not be as useful as we thought. We are looking to increase the number of PWM outputs while the STM only expands the current outputs to allow for more pin connections. We need to run at least 10 different motor pairs and the Arduino Uno only has 6 built-in PWM pins. After figuring this out, I started to research ways to drive the necessary number of motors. I ended up finding the “Adafruit 16-Channel 12-bit PWM/Servo Driver – I2C interface” which gives us the additional motor controller we need. There are also videos of it being used to successfully use higher power motors than the ones we have. After that research, I focused on ordering parts.
This week, I also researched accelerometers, Bluetooth transceivers, and hardware controllers we would need for the physical input we want to add to our game. This was after our interview with Mimi and the feedback that a physical input option would be great (talked about more in the team status report). I found there is a relatively inexpensive IMU on Sparkfun that can connect to Arduino, and found a Bluetooth transceiver which is used in multiple project demos across the internet, and found the Arduino Micro or Nano to be small enough to fit on the physical input “stick”.

Update on if the project is on schedule:
On the schedule, I believe we are going to be a couple days behind. This is due to the fact that I had created my schedule thinking I would have time to research parts on Monday and hopefully order by Wednesday. With class time dedicated to watching project proposals this week, parts ordering got pushed back to Thursday. With the way the parts ordering works, I am unsure if I have to wait until next Tuesday before the order goes through. This could lead to further delays as I had planned to get our parts in by the middle of next week.
One consideration that will help me stay on schedule is that in the original schedule, I had also planned to make a PCB to control the motors. With the Adafruit servo driver, I do have some wiggle room. To stay on schedule, I plan to start creating the code to control the motors and I2C device so I will be ready to test by the time they come in.
Deliverables for next week:
By the end of this week (I’m writing this Friday morning), I hope to do one last review on the parts for the physical input and order them. Next week, I plan to get started with writing an algorithm to activate multiple motors at the same time. This will include drawing out an outline for how I want to take in data and design the overall architecture for accomplishing my part of the project.
I will also have to work with Bethel and Amelia on our design presentation deliverables.