What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
Progress from Last Week
A highlight from this week was my teammate Sophia’s successful presentation of our design slides on Monday. On the other hand, I had planned to finish transferring the game code from Javascript, HTML and CSS to Node JS as well as start tracking the coordinates and game actions of the different enemies within the game this week; however, this has proven to be more challenging than I had initially anticipated.
I am primarily having difficulty translating the AI code from Javascript to Node JS. The AI serves the purpose of generating different Athenians to flock to the player within the game, creating new terrain as the player moves in different directions, among many other functions.
Considering this setback, I will be debugging the errors I am encountering before moving on to listening for the game events of different sized enemies within The Last Spartan.
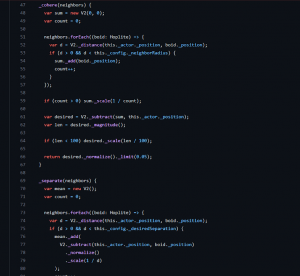
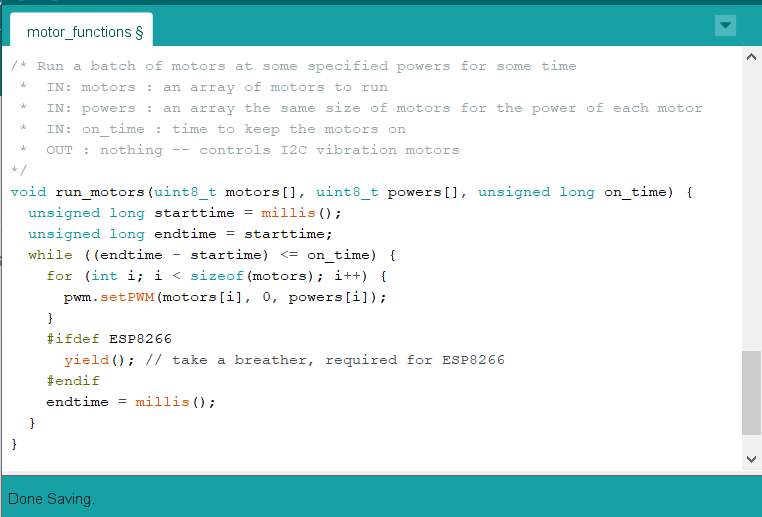
Figure 1. Shows the AI portion of the game code which is responsible for causing different Athenians to flock to the player within the game.
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
Having encountered translation issues with the AI portion of the game code, I will need to invest some time this week to debugging my current code. This further risks delaying two main tasks namely, building the Node JS server and tracking the coordinates and game actions of the different enemies within the game. Since, listening for the game actions of different enemies is completely contingent upon the successful translation of the game code I will inevitably have to delay this task. On the other hand, I can start building the Node JS server while simultaneously debugging my translated code in order to mitigate severe delays from occurring in our schedule.
What deliverables do you hope to complete in the next week?
My deliverables are the same as those of last week with a few additions considering the issues I need to debug. Thus, I plan to finish transferring the game code from Javascript, HTML and CSS to Node JS as well as start tracking the coordinates and game actions of the different enemies within the game. I also plan to build the Node JS server simultaneously with my other tasks.