What I did this week:
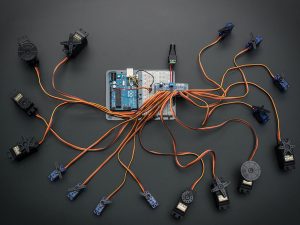
I spent this week researching what advantage the STM Nucleo boards give us so we don’t end up buying something we won’t benefit from. It turns out that the board will not be as useful as we thought. We are looking to increase the number of PWM outputs while the STM only expands the current outputs to allow for more pin connections. We need to run at least 10 different motor pairs and the Arduino Uno only has 6 built-in PWM pins. After figuring this out, I started to research ways to drive the necessary number of motors. I ended up finding the “Adafruit 16-Channel 12-bit PWM/Servo Driver – I2C interface” which gives us the additional motor controller we need. There are also videos of it being used to successfully use higher power motors than the ones we have. After that research, I focused on ordering parts.
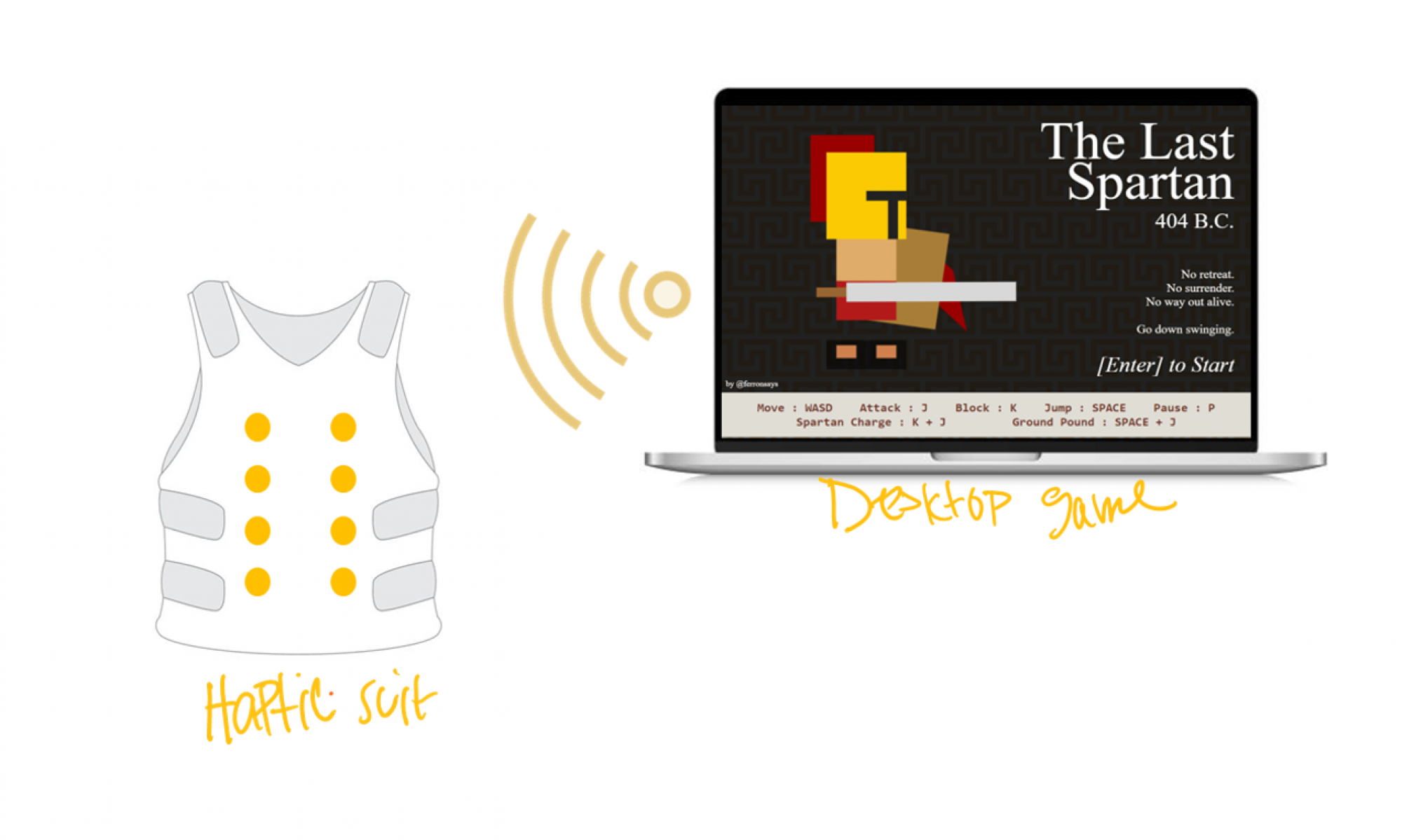
This week, I also researched accelerometers, Bluetooth transceivers, and hardware controllers we would need for the physical input we want to add to our game. This was after our interview with Mimi and the feedback that a physical input option would be great (talked about more in the team status report). I found there is a relatively inexpensive IMU on Sparkfun that can connect to Arduino, and found a Bluetooth transceiver which is used in multiple project demos across the internet, and found the Arduino Micro or Nano to be small enough to fit on the physical input “stick”.

Update on if the project is on schedule:
On the schedule, I believe we are going to be a couple days behind. This is due to the fact that I had created my schedule thinking I would have time to research parts on Monday and hopefully order by Wednesday. With class time dedicated to watching project proposals this week, parts ordering got pushed back to Thursday. With the way the parts ordering works, I am unsure if I have to wait until next Tuesday before the order goes through. This could lead to further delays as I had planned to get our parts in by the middle of next week.
One consideration that will help me stay on schedule is that in the original schedule, I had also planned to make a PCB to control the motors. With the Adafruit servo driver, I do have some wiggle room. To stay on schedule, I plan to start creating the code to control the motors and I2C device so I will be ready to test by the time they come in.
Deliverables for next week:
By the end of this week (I’m writing this Friday morning), I hope to do one last review on the parts for the physical input and order them. Next week, I plan to get started with writing an algorithm to activate multiple motors at the same time. This will include drawing out an outline for how I want to take in data and design the overall architecture for accomplishing my part of the project.
I will also have to work with Bethel and Amelia on our design presentation deliverables.



