What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
My team and I brainstormed and compiled a variety of ethical considerations concerning our project in preparation for the ethics lecture and group discussion.
This week I was able to track the forceful jump game event successfully using JavaScript event listeners. I have decided to incorporate a web scraper library known as Puppeteer to aid in tracking the game actions of the remaining three events, namely small hit, large hit and low health. Puppeteer will help me analyze different enemy actions in order to accurately transfer data relevant to the game action taking place. For instance, we would not want a low health event to be flagged every time the life bar decreases, instead we would like this event to be activated when the bar decreases to 25% of its original length.
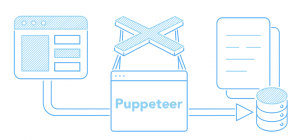
Figure 1. Shows how Puppeteer interacts with the live data inputs coming from the browser which it passes on to our Node JS server.
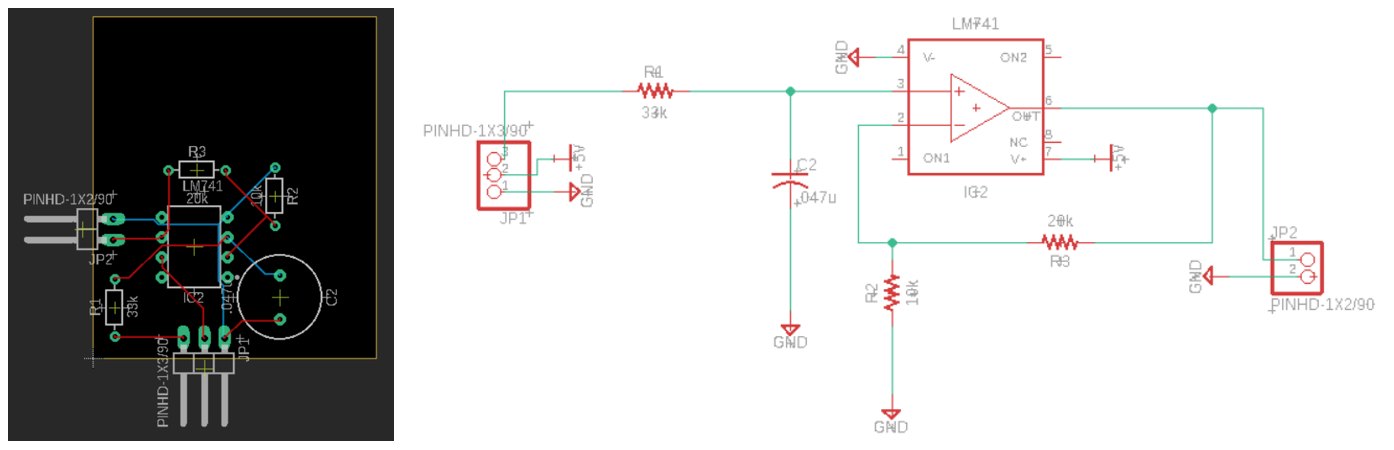
After building the Node JS server last week, I tested my code using a two button webpage, whereby the “Turn Motor On” button represents the activation of a game action and the “Turn Motor Off” button deactivates the motor as shown in Figures 2 & 3. This helps test the proper functionality of the Node JS server while it is in the early development stage. Furthermore, I have designed a single motor circuit using an Arduino Uno as shown in Figure 1. to simplistically mimic the behavior of our system of motors.

Figure 2. Shows the simple two button webpage I used to test the functionality of my Node JS server.
Figure 3. Shows the simple Arduino code I used to test the functionality of my Node JS server.
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
My progress is somewhat back on track since I have managed to build the Node JS server based on dummy data and successfully track one game action. I still have to integrate the two components together and test them in unison before I proceed. I will also be focusing on how to use Puppeteer to acquire data from all the remaining game actions as well.
What deliverables do you hope to complete in the next week?
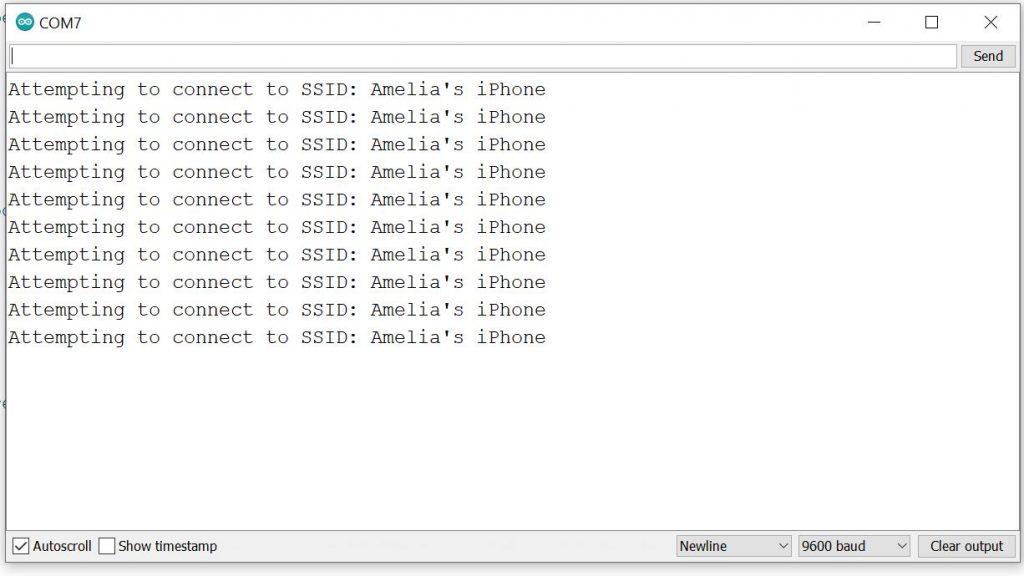
This week I plan to integrate the two components to see whether the Node JS server can relay our game data successfully to our simple motor circuit. Moreover, I plan to test my software on the Arduino WIFI Rev while it is still connected to a PC, before moving on to establishing a wireless connection.