What are the most significant risks that could jeopardize the success of the project? How are these risks being managed? What contingency plans are ready?
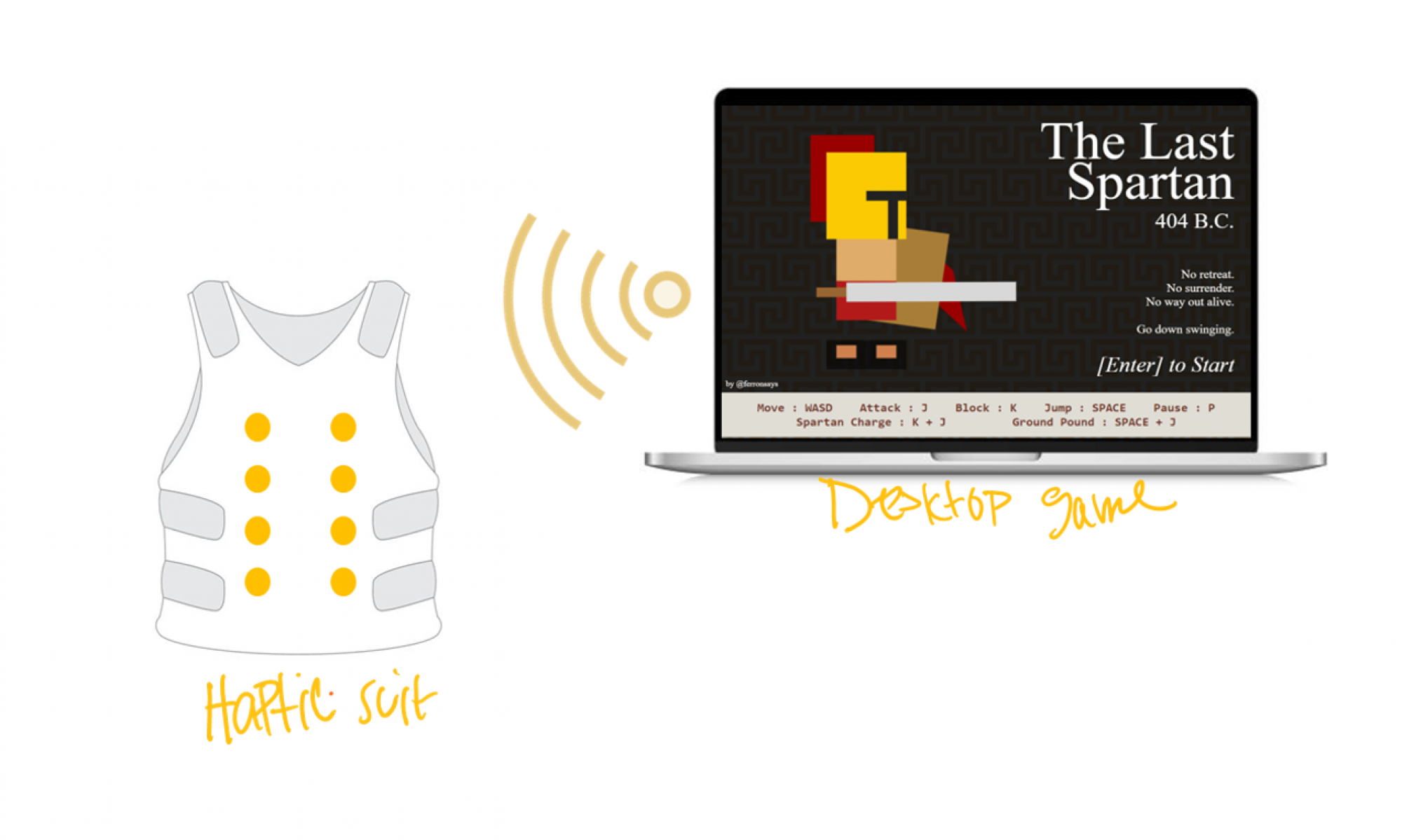
Since the PCB arrived this week and works as intended, the next significant risk would be not getting the proper data sent between the Node JS server and the WIFI Rev. This step is integral towards having a completely wireless experience when using our solution. As of now, the Node JS code is able to send data to the WIFI Rev, it’s just not the game data we want. We do want to move forward in order to get to the testing and validation stage of our project, so if we can’t get it to work by the end of the week, we will revert back to having a wired arduino to the laptop. The arduino is able to respond to Node JS data when it is connected to a specific port, as Bethel demonstrated in earlier status reports so we should have no problem if we switch to this.
Were any changes made to the existing design of the system (requirements, block diagram, system spec, etc)? Why was this change necessary, what costs does the change incur, and how will these costs be mitigated going forward?
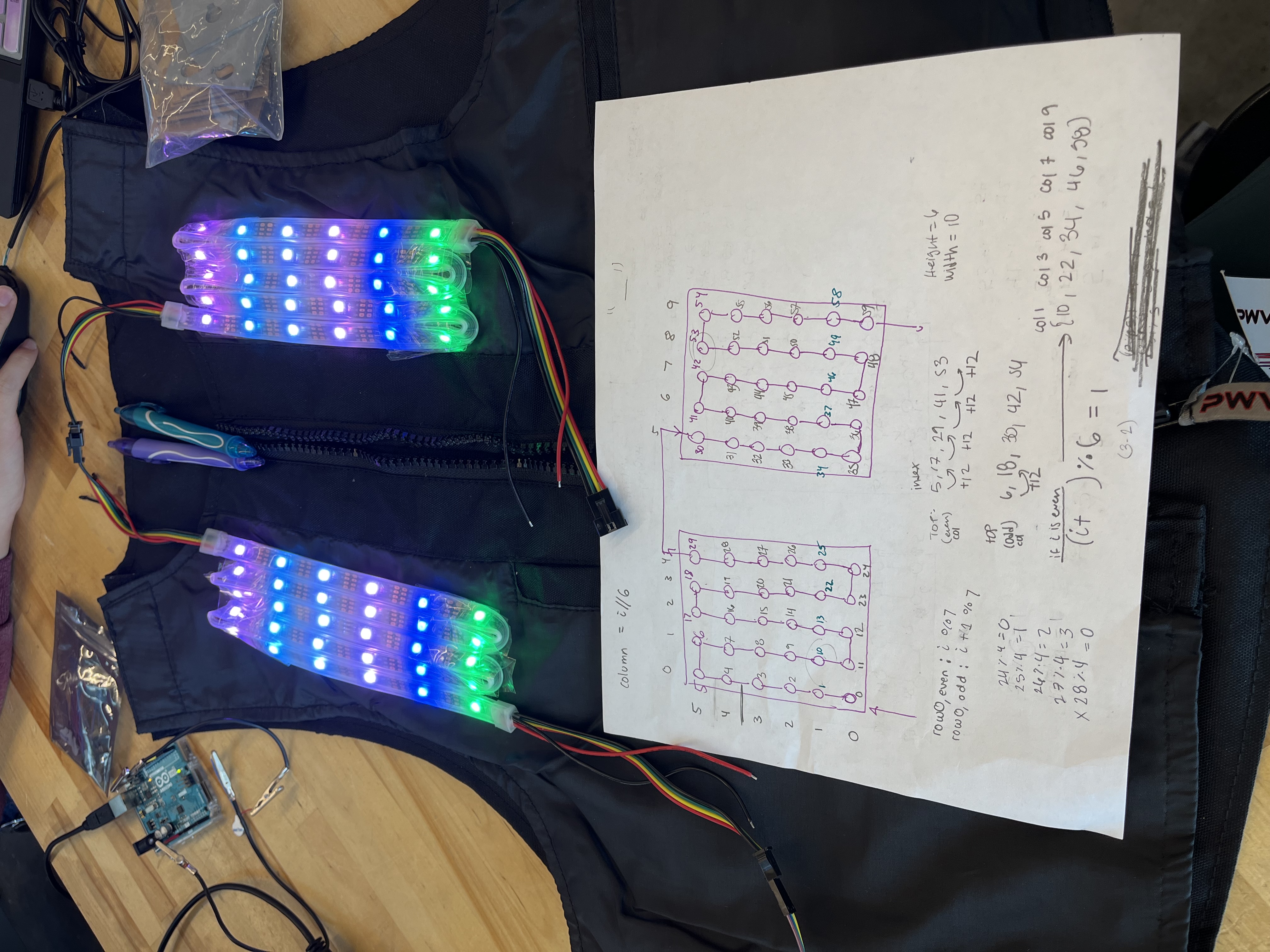
Since we had an interim demo this week, we ordered ribbon cables and the remaining PCB parts. The PCBs were a component we added on later within our design process. Our current design of our motor systems benefit from having an efficient distribution of power to our motors, which makes for both a bettered immersive experience and more distinguishable motor propagations for the user
Additionally, we decided to laser cut our “pocket” squares in order to achieve a more uniform look and stay consistent with sizing. This saved us a considerable amount of time as well, since we no longer have to sit and manually cut 10+ squares. We used fabric that was free and available to us through IDEATE.
Provide an updated schedule if changes have occurred.
We don’t have an updated schedule, but plan to start validation testing by 4/14. Given that the rest of the PCBs will not arrive by then, validation will take us up till the final demo.