
I finished the following this week:
- Set up our new wifi module for the drone and successfully used it to receive telemetry and error messages from the drone.
- Overall get the drone flying with remote control.
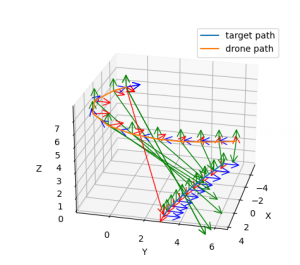
- Implement a first attempt at motion planning that uses MPC to solve for optimal viewpoint (keep target centered in image as target moves) with the drone flying to keep up. A picture of the resulting plan is shown below. The green arrows show the vector from the camera center to the ground. You can see how initially, the drone’s camera is not centered on the target, but over the next 10 steps, the drone executes a maneuver to properly focus on the target.
- Calibrate new camera’s intrinsic parameters
- Successfully send motion commands to drone through code. To do this, I set up UART communication between the drone and the flight controller and adjusted the flight controller’s baud rate to transmit messages fast enough.
- Set up safety protocols for the drone including low battery failsafe and boundaries for where the drone can fly. Currently, if the drone flies out of the boundary, it immediately enters a “Hold” flight mode and immediately stops moving and holds its current position in the air.
TODOs Next week:
- Get motion planning working on the physical drone. This means speeding up the code a lot (the above motion plan took 12 seconds to solve for, which is way too slow. We need to send motion commands at least every 0.5 seconds as a hard restriction by the flight controller).
- Calibrate the full 3D target pose estimation on the real drone. Conduct tests and verify performance