
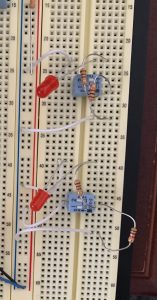
This week I worked on making the button circuit which will be used to start/stop flight and start/stop video streaming/recording:
I also worked on the RPi camera. I tried implementing the 12MP camera with the Pi 4 but that did not work either so we have decided to use a 5MP camera Alvin had from a previous project. Here is a sample image from the camera:

I wrote a script to save the video to SD card as we plan on verifying some of our requirements on the recorded video. I also wrote a script to start/stop the video capture with switches as it will be easy to do that than have a computer and keyboard/mouse every time we want to start/stop flying.
The ROS connection on the Pi was not working and I am in the process of understanding why this is the case. There is a “connection” being made but using turtlesim, when pressing the keyboard arrows, the turtle does not move.
I am still on schedule. By next week, I want to resolve the ROS bug and get the Pi and TX1 communicating. I want to be able to stream the video captured on camera connected to Pi and feed it into my object detection code on the TX1. Finally, I hope to write code to integrate the switches I have prototyped with the TX1 so a start/stop signal is recognized. I spend too much time trying to make the 12 MP camera work, so I intend to spent more time this week to finish these goals so hopefully we can fly by end of next week.