
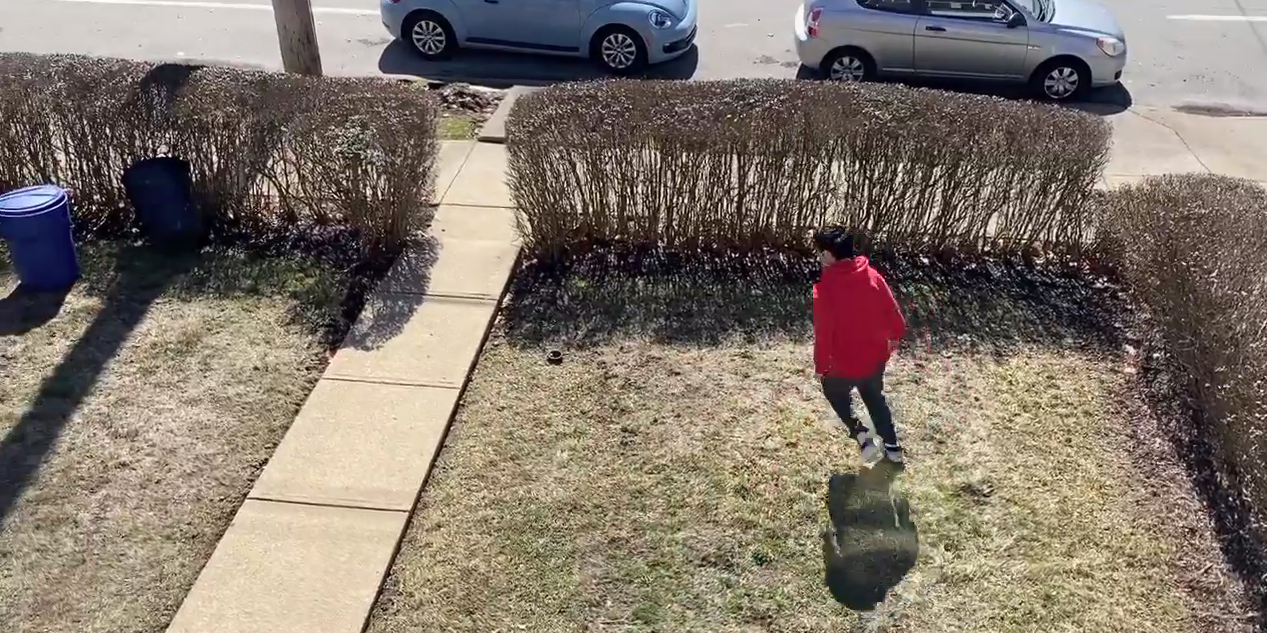
This week I worked on testing the computer vision algorithm I implemented last week. The test setup was a stationary 12 MP camera (to simulate the one we will use) at an approximate height of 20ft recording a person walking and running wearing a red hoodie (our target) under sunny and cloudy environment:

Sunny condition

Cloudy condition
The algorithm did not work well for the cloudy condition (where the target is walking) as it picked up the blue trash can and car that was parked:

Note the blue dot in the center of the red bounding box is the center of the tracked object. In the first picture, the algorithm switches from tracking the person to tracking the blue car parked
Under the sunny conditions (where the target is jogging), the algorithm was perfect in tracking the person:

As seen from the above picture, the blue car and garbage can are filtered out.
To better the algorithm for not well lit conditions, I used rgb filtering rather than converting to hsv space:


In the first picture, the new algorithm is still tracking the person and has filtered out the blue vehicle in the background. In the second picture, the new algorithm also filters out the blue garbage can unlike the old algorithm.
The new algorithm also worked in the sunny conditions:

Therefore, the algorithm using rgb filtering will be used. I also calculated the x, y position of the center of the target’s frame which will be used by Sid for his sate estimation algorithm.
We are on track with our schedule. Next week, I will shift my focus on developing the circuitry for the buttons, and if I get the camera we ordered, I will run the computer vision on the TX1.