
Since the TX1 ran out of internal memory, we weren’t able to download OpenCV on it, so I worked on my laptop using the built in camera to implement a color filter to detect a red shirt. I placed a dynamic bounding box on the object that is being filtered to see if it matches the object we want to track. Here is a picture of the filter working at a 10 feet distance from camera:

The filter had some issues detecting the shirt at a closer distance, which I am assuming is due to the shadows caused by the light coming from the window that is directly in front of me. Since I am closer to the window I think the light is having a more prominent role on the filtering algorithm. However, I am still able to detect the correct object that I want to track as shown by the bounding box:
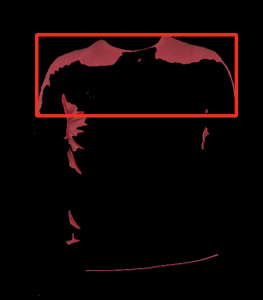
One more concern is that the filtering algorithm seems to not be able to filter out blue. My quick fix for now is to store the biggest contour I can detect and calculate the center-point of that rectangle to get the (x, y) position of the object I want to track:

This way, even though there is some noise, I am still able to get the right object to track.
I also worked on the design presentation this week and helped the team finalize components and place orders.
I am not behind schedule and next week I plan to test the filtering algorithm on an aerial footage to see how the algorithm performs and if I need to improve it. Sid will help me get the aerial footage. I am also meeting the team tomorrow to finish setup of the TX1.