- added function withinIntersection which checks whether a vehicle is within the intersection to allow for detection of cars from different lanes
- Ran tests under multiple scenarios to test robustness of the simulation/IDM
- Experimented with different hyperparameters such as max number of cars passing the intersection
Tito status report – 4/18/20
- Tuned weight parameters to boost priority for vehicles closer to the intersection.
- V2V Communication
- Added functionality for a vehicle to communicate its presence to the preceding vehicle after reaching a certain threshold distance to the intersection.
- Implemented information relay so vehicles can pass on information to the foremost vehicle in a lane.
- Incorporated communication latency into v2v communication
Team status report 4/11/2020
- Fixed bugs and made minor improvements in preparation for demo
- Fixed problem with graphic simulation over counting the number of loops made by the cars
- Fixed problem where more cars were passing through the intersection than were allowed.
- Modified code to allow for cars to move with a smaller following distance in the cooperative case
- Improved interface between path planning and intelligent driver model code.
- Working on changing coop vs non-coop test method to account for program scheduling/timing variability across tests.
- Added GUI features
- Toggle button between cooperative and non-cooperative modes
- Toggle button for detection radius on each vehicle
- Labels on vehicles
- Implemented testing integration to compare throughput between approaches
- Creating input and output file functionality for writing test cases and viewing results
- Test cases are inputted through a txt, and results are outputted in a csv to use with Excel
- Integrated test feature with simulation code
- Filtered test cases to ensure there are no initial collisions between vehicles
- Simulated cases and analyzed initial results
- Creating input and output file functionality for writing test cases and viewing results
- Changed timing so it is more consistent throughout machines
- Used the universal time elapsed between function calls to determine distance traveled
- Began work on 2 Lane track
- Implemented vehicle to vehicle communication mechanism in 2 lane setup
- TODO:
- Integrate path planning code with lane changing model
Tito status report 4/11/2020
- Fixed bug with figure 8 environment whereby more cars than allowed passed through the intersection
- 2 Lane environment
- began working on planning for the 2 lane environment.
- Implemented vehicle to vehicle communication mechanism which also incorporates communication latency
- TODO:
- Figure out the design of lane changing model and integrate with path planning code.
- Decide on problem situations to account for e.g stopped vehicle, quickly accelerating vehicle etc.
Team Status Update 4/4/2020
- Integrated path planning code with Intelligent driver model.
- Decided on Non Cooperative decision making:- To allow the car closest to the intersection to pass through. Ties are broken by the car in the left lane
- Implemented Non Cooperative decision making
- Parameter tuned for Cooperative case
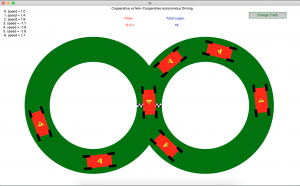
- Discussed metrics to display on GUI such as total number of cars looping through the intersection.
- Updated GUI with timer, total loops, vehicle ID and intersection line
- Added functionality to outer lane of 2 lane track
- TODO: still need to fix detection with 2 lanes
- TODO: Take measurements to compare the different approaches
- TODO: Add information constraints
Update: So far, we haven’t noticed a huge increase in throughput between the approaches. We will continue to fine tune our cooperative planning to get a better performance. However, we would like to experiment with a two-lane track to introduce lane changing to the demo. This is because with lane changing, vehicles can now change their speed and their path. This added component of path will be a lot more knowledge communicated in the cooperative case, which should yield a larger difference in performance.
Tito status update 4/4/2020
- Cooperative Case improvements
- updated cooperative decision making to allow multiple cars from one lane to pass through the intersection.
- Factors in the spacing between cars to determine if it will be beneficial to allow multiple cars passage.
- Fine-tuned parameters for decision making such as car separation, distance to intersection with which a car is considered to be approaching the intersection, etc.
- Refactored code to work better with intelligent driver model.
- Non Cooperative Case
- Added functionality for the non-cooperative case which simply gives right of way to the car closest to the intersection. If there’s a tie, the left car gets the right of way.
Tito status report 3/28/2020
- Built Cooperative path planning environment class
- controls vehicle movements based on othetor vehicle locations and cooperative strategy
- Current fairness strategy prefers vehicles from a longer queue but can scale to a more complex strategy given a set of features.
- Environment continuously selects a single vehicle to pass through the intersection (of a figure 8 track)
- Path planning class allows for a different number of cars on either track
- Integrated path planning class with graphic simulation so that at every time step it takes as an input the vehicles on the track and updates their locations.
- Tested performance of graphic simulation with PP class and it seems to work fine
- Fixed a bug where certain cars could pass through other cars
- TODO
- Incorporate vehicle acceleration/deceleration to allow for smoother movement as opposed to the vehicles coming to an abrupt stop.
- Investigate better fairness strategies to decide vehicle to pass through the intersection
Tito status report 3/21/20
- Met with team members to discuss the rescoping of our project and redistributed tasks.
- Detailed project restructuring in the new design report
- Created a high-level processing pipeline for cooperative path planning
- Identified useful cooperative signals for different track designs
- TODO:
- Write starter code for cooperative v2v communication
- Integrate path planning code with graphic simulation
Tito status report 2/29
- Consolidated design specifications such as maximum vehicle control latency based on worst case scenarios.
- Measured average-case performance of object detection algorithm. It processes approximately 28 fps.
- Wrote design report/ design presentation
Team status update 2/29
- Design Presentation
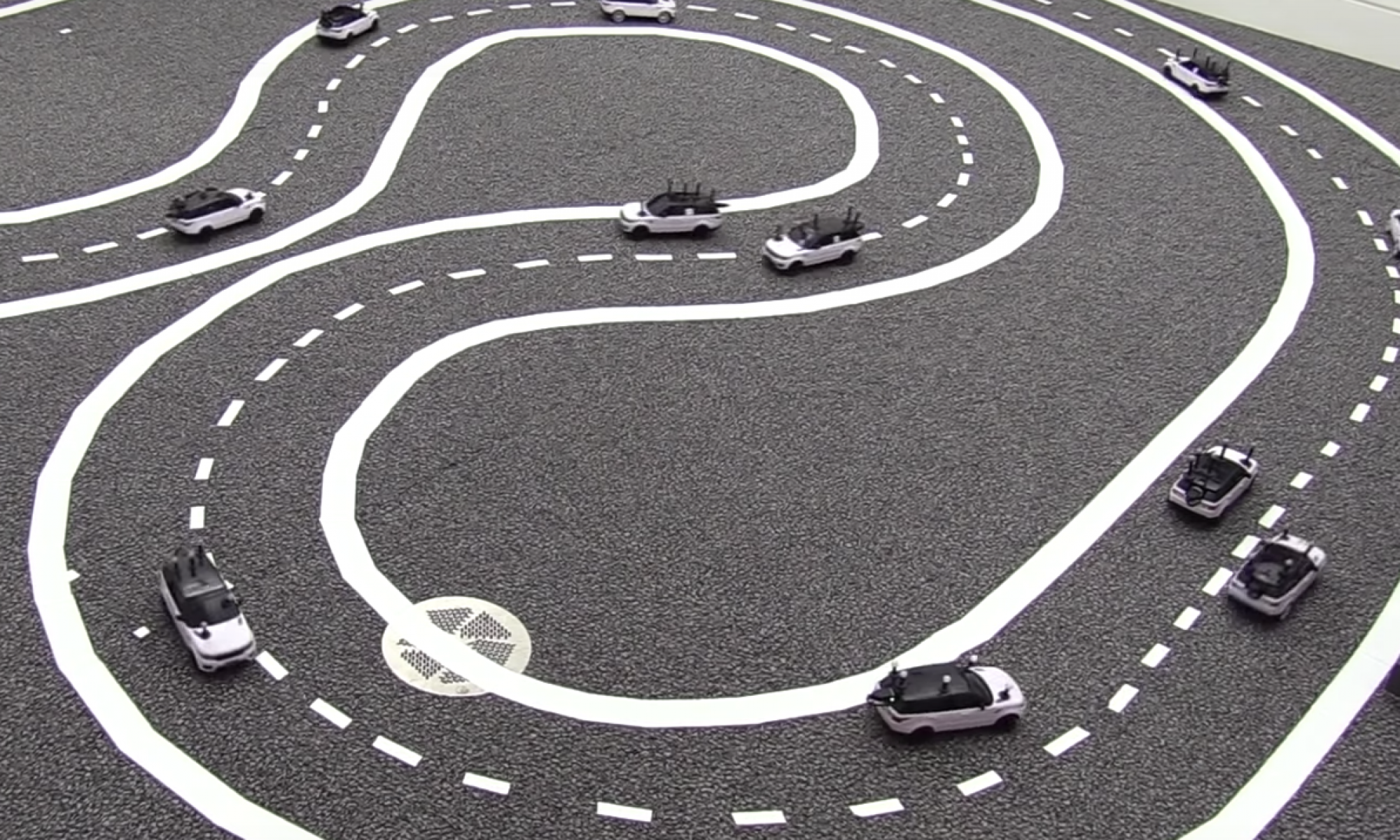
- Measured out length, width, radius, etc. of figure-8 track
- Built sample version of track through tape
- Measured ideal camera height above track (in order to view the whole track within a frame)
- Finished basic server communication code and tested communication latencies for sending different types of data (strings vs bytes)
- Decided on granularity of speeds to send over to optimize the communication vs. information tradeoffs
- Created integrated code base for detection and path planning
- Created vehicle and track classes
- Completed design presentation
- Design Report
- Consolidated design specifications such as maximum vehicle control latency.
- Ran tests on our vehicles to get metrics on speed, communication latencies, etc.
- Ran tests on camera detection and tags to get maximum frames per second that the code can process
- Completed design report
- TODO:
- Fix power issue in circuit to get vehicles running
- Test camera detection on running vehicles with tags to ensure accuracy
- Test vehicles to create correspondence between numerical value programmed with actual vehicle speeds in cm/sec