- Design Presentation
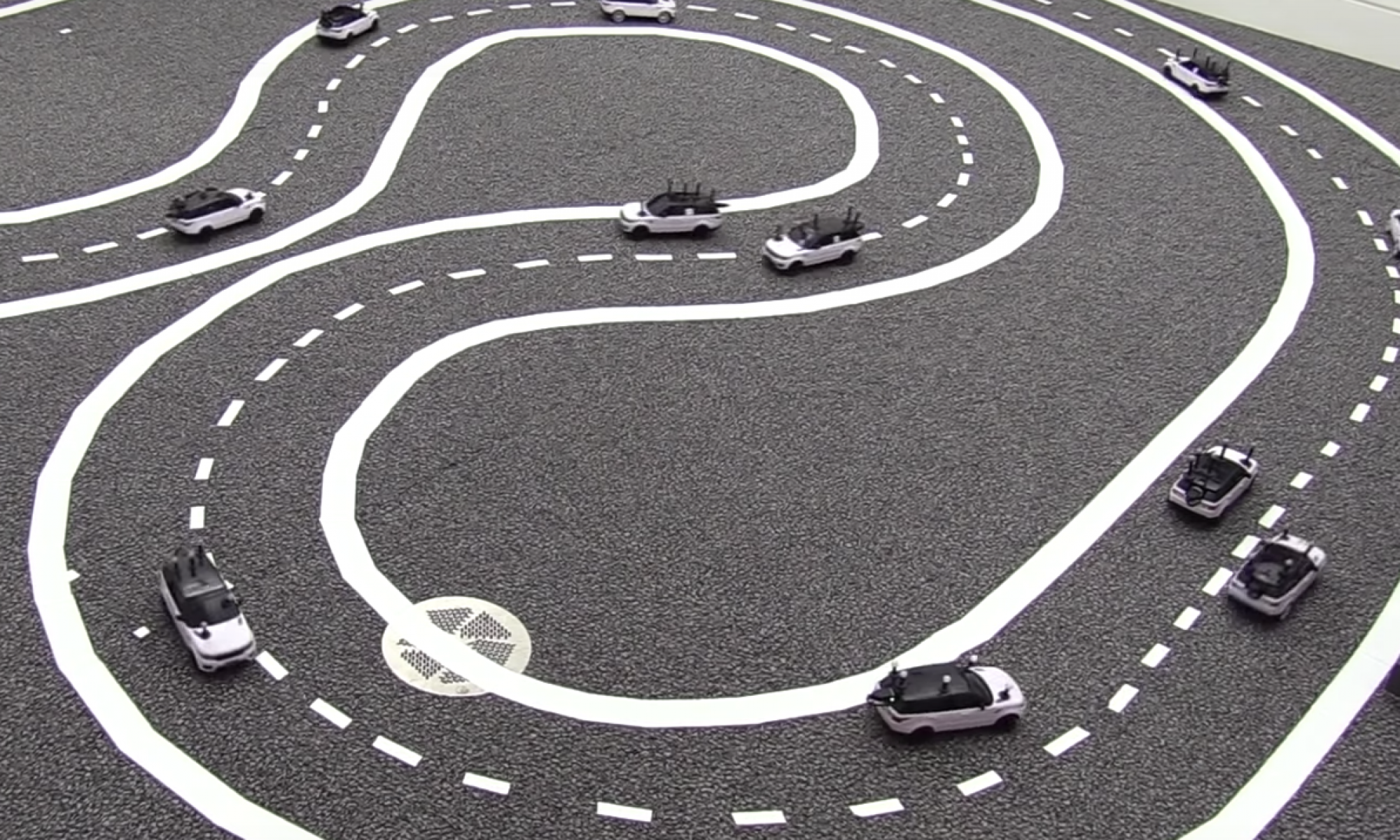
- Measured out length, width, radius, etc. of figure-8 track
- Built sample version of track through tape
- Measured ideal camera height above track (in order to view the whole track within a frame)
- Finished basic server communication code and tested communication latencies for sending different types of data (strings vs bytes)
- Decided on granularity of speeds to send over to optimize the communication vs. information tradeoffs
- Created integrated code base for detection and path planning
- Created vehicle and track classes
- Completed design presentation
- Design Report
- Consolidated design specifications such as maximum vehicle control latency.
- Ran tests on our vehicles to get metrics on speed, communication latencies, etc.
- Ran tests on camera detection and tags to get maximum frames per second that the code can process
- Completed design report
- TODO:
- Fix power issue in circuit to get vehicles running
- Test camera detection on running vehicles with tags to ensure accuracy
- Test vehicles to create correspondence between numerical value programmed with actual vehicle speeds in cm/sec
Team A1: Cooperative vs Non-cooperative Autonomous Driving
Carnegie Mellon ECE Capstone, Spring 2020: Kylee Santos, Tito Anammah, Serris Lew