- Integrated path planning code with Intelligent driver model.
- Decided on Non Cooperative decision making:- To allow the car closest to the intersection to pass through. Ties are broken by the car in the left lane
- Implemented Non Cooperative decision making
- Parameter tuned for Cooperative case
- Discussed metrics to display on GUI such as total number of cars looping through the intersection.
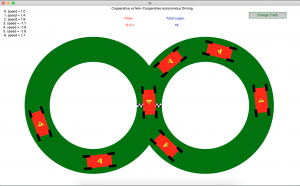
- Updated GUI with timer, total loops, vehicle ID and intersection line
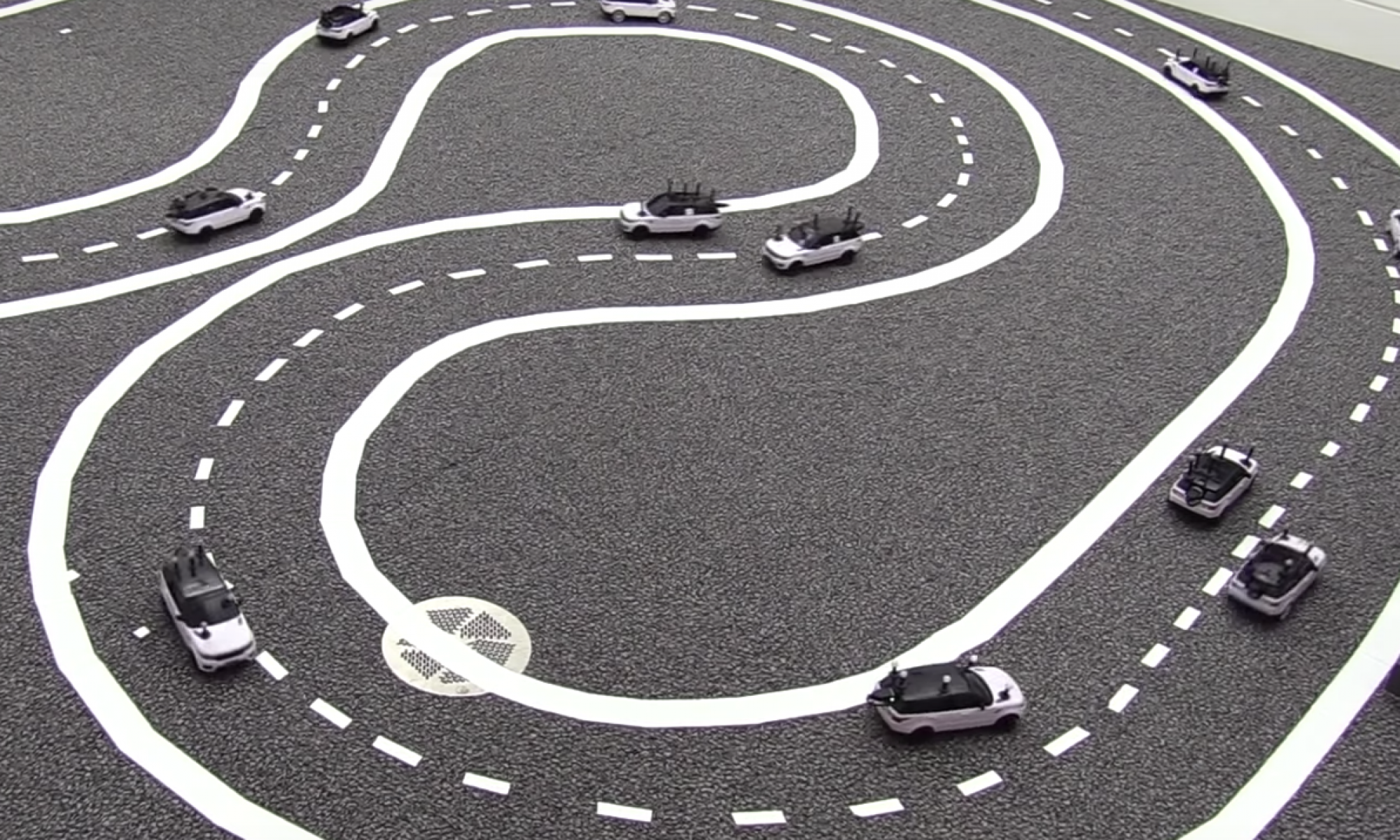
- Added functionality to outer lane of 2 lane track
- TODO: still need to fix detection with 2 lanes
- TODO: Take measurements to compare the different approaches
- TODO: Add information constraints
Update: So far, we haven’t noticed a huge increase in throughput between the approaches. We will continue to fine tune our cooperative planning to get a better performance. However, we would like to experiment with a two-lane track to introduce lane changing to the demo. This is because with lane changing, vehicles can now change their speed and their path. This added component of path will be a lot more knowledge communicated in the cooperative case, which should yield a larger difference in performance.