- Fixed bugs and made minor improvements in preparation for demo
- Fixed problem with graphic simulation over counting the number of loops made by the cars
- Fixed problem where more cars were passing through the intersection than were allowed.
- Modified code to allow for cars to move with a smaller following distance in the cooperative case
- Improved interface between path planning and intelligent driver model code.
- Working on changing coop vs non-coop test method to account for program scheduling/timing variability across tests.
- Added GUI features
- Toggle button between cooperative and non-cooperative modes
- Toggle button for detection radius on each vehicle
- Labels on vehicles
- Implemented testing integration to compare throughput between approaches
- Creating input and output file functionality for writing test cases and viewing results
- Test cases are inputted through a txt, and results are outputted in a csv to use with Excel
- Integrated test feature with simulation code
- Filtered test cases to ensure there are no initial collisions between vehicles
- Simulated cases and analyzed initial results
- Creating input and output file functionality for writing test cases and viewing results
- Changed timing so it is more consistent throughout machines
- Used the universal time elapsed between function calls to determine distance traveled
- Began work on 2 Lane track
- Implemented vehicle to vehicle communication mechanism in 2 lane setup
- TODO:
- Integrate path planning code with lane changing model
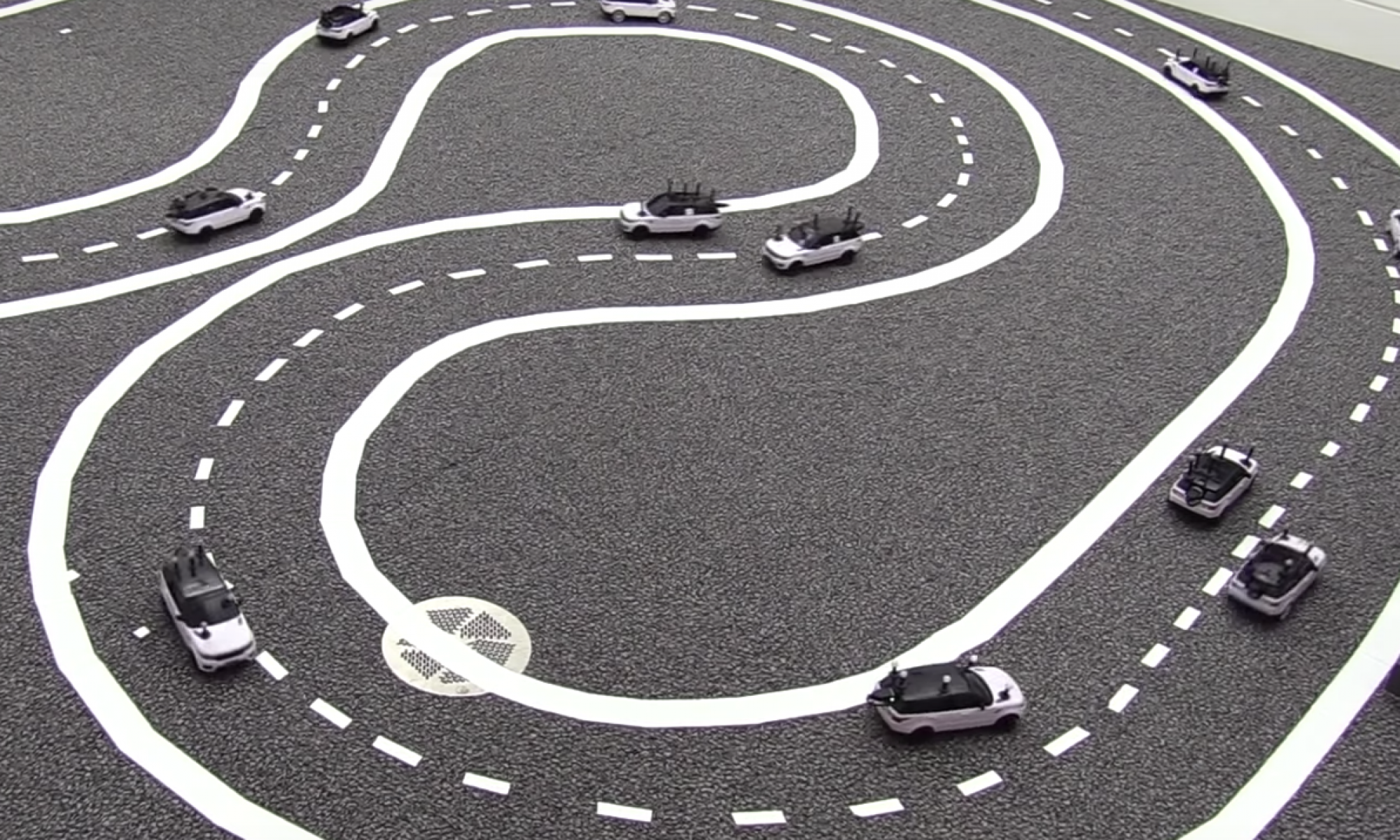
Team A1: Cooperative vs Non-cooperative Autonomous Driving
Carnegie Mellon ECE Capstone, Spring 2020: Kylee Santos, Tito Anammah, Serris Lew