
This week I worked on both the edge detection and April tag code.
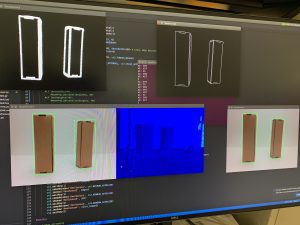
Firstly, I improved the April tag detection so the algorithm is able to detect an April tag from the camera’s stream, and return the center and coordinates of the tag along with the pose matrix, which allows us to calculate the distance to the tag and the angle. The results of this are shown below:

Second, I worked on improving the edge detection code, to get a bounding box around the different boxes visible in the camera’s stream. The bounding box also allows us to get the exact location of the box, which we will later use to actually retrieve the object. The results of this are shown below:
Finally, I worked with my team on the navigation of the robot. By combining our individual components our robot can now travel to the exact location of the April tag which marks the shelf. The robot is also able to drive up to the exact location of the item which has the laser point on it, and center itself to the object. Over the next week I plan to continue working with my team to finish up the final steps of our implementation.