This week I finalized the main hardware structures for our robot. Esther and I agreed to use components from the Rev Robotics vendor. This is because the components are compatible, and we would not have to worry about booking inconsistent sizes or models from different suppliers. In addition, Rev Robotics has well-maintained documentation and CAD models for each part, which makes designing the chassis much more convenient. Since our robot would be 3 ft in height, I plan to design my chassis with roughly a size frame of 60cm x 60cm, along with 90mm diameter omni wheels. However, I haven’t done an extensive weight/force calculation yet to gauge the appropriate frame. I would invest in the details more throughout next week leading up to the design report, and this might likely change. Most of my progress this week has been prototyping / CADing the chassis frame. At first, I decided to use motors from other vendors, but realized that finding an adequate motor mount that fits other components in the Rev Robotics kit is very difficult. I also learned the importance of designing. While assembling the parts, I realized that the screw header from the motor mount would interfere with the wheels, due to the motor rod being too short for multiple components to fit on. This would be something I might not have thought of if I went straight into implementation, especially since these are the steps listed on the documentation. After choosing a new pair of mounts, and avoiding the usage of some pins, fortunately the issue is resolved.
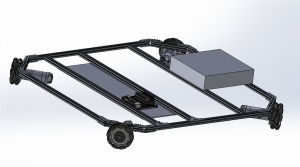
Attached is the CAD for the wheel chassis so far. I haven’t included some of the screws yet, but the overall design is not affected. I am using the Jetson Nano here in place of the Jetson Xavier since I couldn’t find CAD models for the latter, but since the overall dimensions for the two are the same, this is used for reference. The back of the robot represents a counterweight that helps balance the robot, since the claw would extrude forward to reach an object. I haven’t decided on what weights to use yet, and this would be determined through calculations of the force relationships, as well as experiments. I still need to include the motor drives, the H bridges, and the connections to the motors for this prototype to be finished, which I would continue to work on for next week. I would start ordering components next week, and research more on the quantitative analysis of our system design, especially the force/torque, and power requirements/limits. This result would lead to our design report. If I find time, I would start my research in the programming aspect of motor control, or start building the chassis if parts come in early enough and the design feedback is positive, where not much needs to be changed
.