Progress
In week 6, design document, design review presentation and hardware implementation have been followed up with lots of progress.
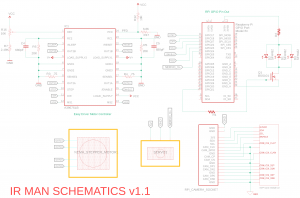
For the design document, I have finished all of my specified sections, including making an electrical schematic for the entire system in Eagle. (My very first time to complete a design in AutoDesk Eagle). All the GPIO pin assignments have been completed that precisely describe how the electrical interfacing and connections will be made between the Raspberry Pi and all the hardware peripherals including Camera, the IR circuit, the motor driver, stepper motors, and servos. (For MVP, we are not going to require laying out a PCB board. But for the final integration, if there’s a need for a more robust and scalable system, we will consider having the PCB board layout done and get it printed.)
On the other hand, I finished capturing the computer vision, image pre-processing and image post-processing pipeline, which streamlines the process of taking a video stream and outputting the list of device locations.


For hardware implementation, all the developments were done in the lab. Since our teammate Shirley went to GHC for this week, I started working on the robotics and motion portion of the project. The EasyDriver parts were also delivered this week and I had a chance to evaluate it and program the EasyDriver board to make it drive the stepper motor with code. And surprisingly, the EasyDriver worked on a portable 9V battery, which would allow our form factor to be more mobile and versatile as opposed to always plugged into wall power.

Now, basic MVP for both IR Circuit and Motor Control has been completed. So far, we have no unexpected technical difficulties spotted that would require us to change our design dramatically and I will push to integrate these pieces of hardware together to program them and test them in an aggregated manner as soon as possible.
For the design review presentation, I went through the presentation slides with Max, our presenter for this time, and gave feedbacks and completing some slides together. Also, help him understand some of the parts that we worked on separately so that he is more comfortable about presenting these ideas.
Schedule
According to Gantt chart, I am still on schedule prior to this week. However, I need to shift my focus a little bit towards the IR Circuit more because I still haven’t tested the functionality on actual devices yet.
Deliverables Next Week
1. Continues Implementing Hardware / Electrical Portion
- Start making IR Circuit more scalable and test on actual devices
- Start exploring the IR database and have a deeper understanding of the signal structure
- Start programming the Stepper Motor and start thinking about the motion planning algorithm
2. Start ID and Mechanical Design of the IR Man
- Start designing the industrial design of the IR Man
- Capture some of the mechanical structures on CAD
3. Finish Writing and Polishing Design Document
- Do revision on any changed parts or adding information after two weeks of development
- Polishing the document and finish parts
- Cut redundant materials
0 Comments