Progress
In week 13, I had progress in manufacturing all the mechanical parts for the IR Man, rotating base, chassis, and mount. I also benchmark tested the CV device locator pipeline with Shirley.
The IR Man figurine is successfully printed on Stratsys 3D printer and the finish is great. While using 10% infill, the part is relatively light and can be easily mounted onto the rotating plate.
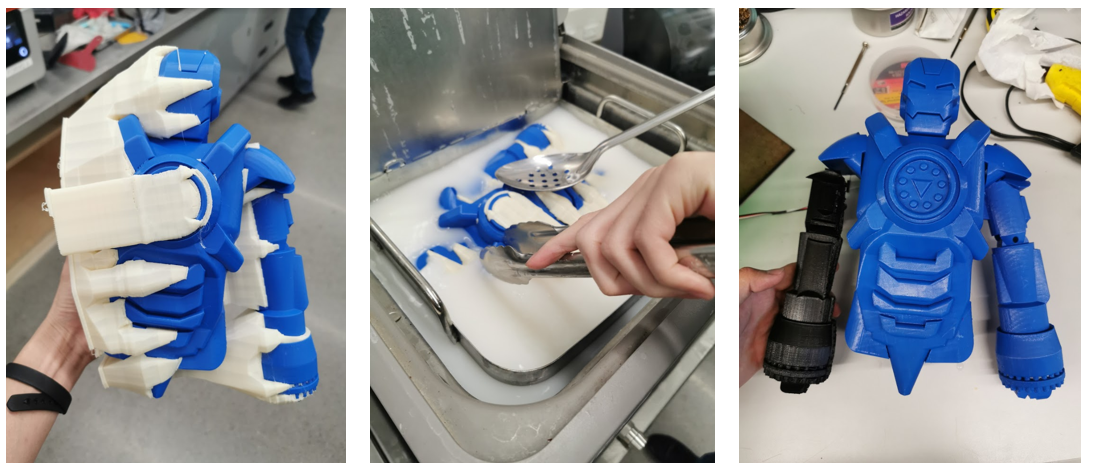
3D Printed IR Man <-> Dissolve Support <-> Awesome Finish
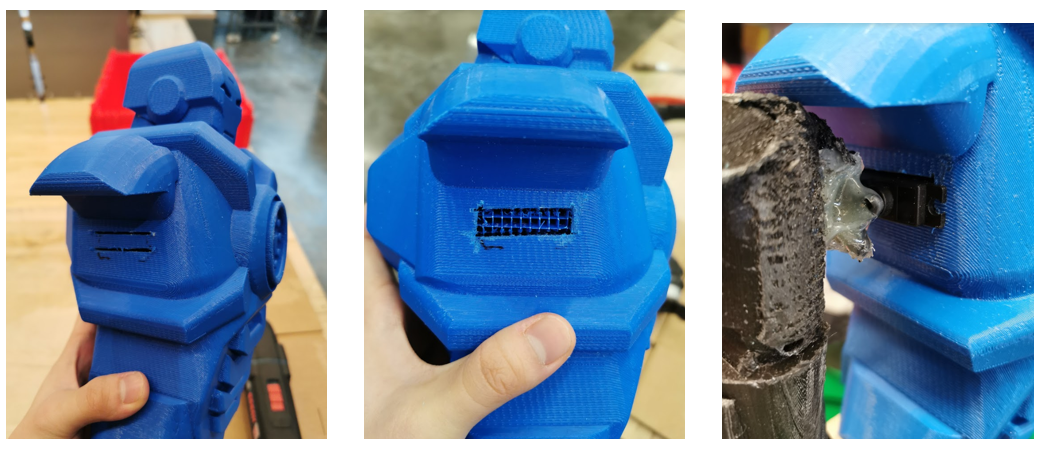
After Print Modification for a notch to put in the servo arm

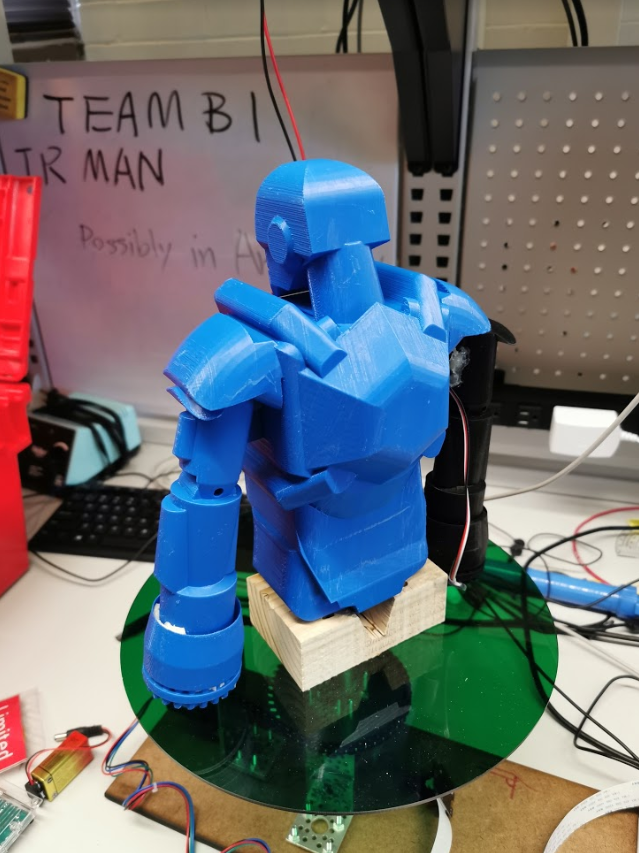
We have also prototyped a wood plank for mounting the IR Man onto the rotating plate. It was a rapid prototyping process and worked for the first time! The IR Man is coming into its physical shape and we have tested the calibration routine.
To read more about the CV device location and calibration progress, please Read More in the team status post.
Schedule
This week’s development is on schedule. Now shifting more focus to mechanical integration and benchmark testing. Also, need to start writing scenario modes. After gathering benchmark data, we need to work on the final presentation and final documents as a team.
Deliverables Next Week
- CV Image Post-processing further Integration and Tuning
- Servo Arm Control and Motion
- Assemble with Slip Ring
- Figure out wiring and Power Distribution
- Strengthen all Mechanical Parts and Assembly
- Do Dead-reckoning on the motion
- WepApp user feedback and dummy-proof
- Communication protocol between GPU Server <-> RPi <-> WebApp Server
- Device location Storing to a local file
- Fix RPi Network and start writing scripts in ~/bashrc
- Scenarios Modes and Programming
- More Mechanical Parts Assembly
- Mounting all the wires, IR circuits, Cameras onto IR Man Body
- Paint IR Man with color
- Benchmark Testing and Metrics Reports for each MVP
- Work on final presentation and final documents
0 Comments