Progress
In week 14, as a team, we made huge progress by finishing (almost) our capstone project. We are proud to say that, IR Man is done.
- CV Device Locator Algorithm extensively tested and tuned
- Servo Arm Control and Motion
- Assemble with Slip Ring
- Motion dead-reckoning with stepper motor and servo
- Strengthen all Mechanical Parts and Assembly
- Device location Storing to a local file
- Final Mechanical Parts Assembly and integration
- Mounting all the wires, IR circuits, Cameras onto IR Man Body
- Paint IR Man with color
- Benchmark Testing and Metrics Reports for each MVP
- Work on final presentation and final documents
Take a look at our finished IR Man:
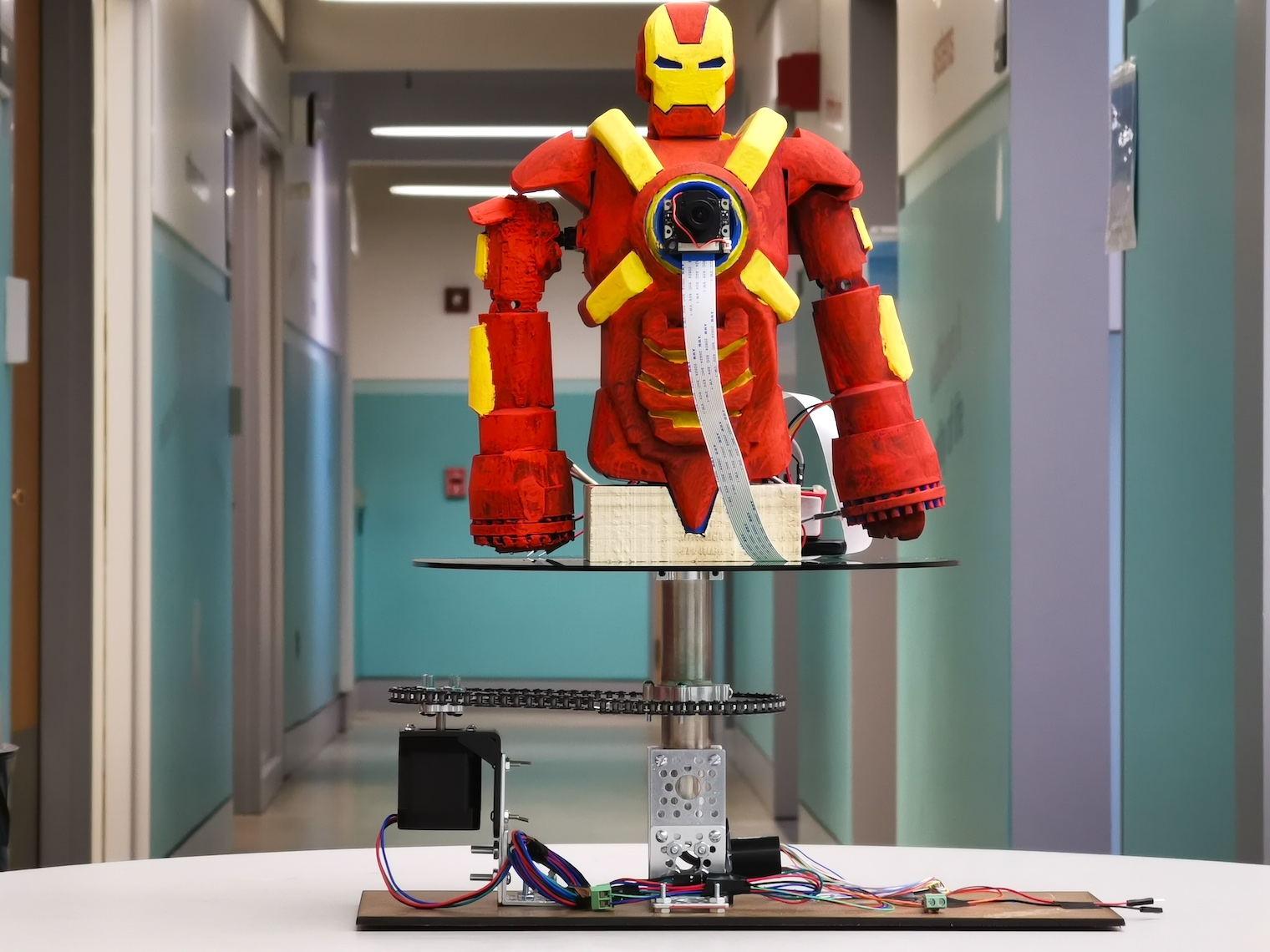
Finished IR Man
In short, this week, all features have been integrated and tested as a system. The system works quite well under normal conditions in the capstone lab. The entire sequence of motion is all within our expectation and behave exactly as we designed. And the finished look of our IR Man is simply stunning.
In this video, we showcase how the IR Man rotating on the rotating plate.
When powered, the motion is going to be driven by the stepper motor connected by the chains.
In this following video, we showcase some close-up looks of the entire mechanical design and appearances.
To remind of our Metrics and Requirements:
| Component | Requirement | Testing Method | Result |
| WebApp Latency | Server to RPi latency under 500ms | Timestep, stress tested with a mock webapp server sending 100 messages to 10 concurrent simulated raspberry pi clients | Avg latency of 24.41ms
Maximum 26.07ms Minimum 20.49ms |
| IR Circuit Success Rate | success rate of 90% within range of 4-10 feets | Collect success rate of all types of command signals from 4 different devices/protocol under distances of 4 to 10 feet | 100% for 4-9 feet
75.2% for 10 feet 96.5% overall |
| Motor Position Accuracy | ± 5 degrees of correct pose | Feed in 8 expected positions and manually check the result | Accurate for stepper motor
Avg error 0.375 degrees for servo motor (Max 2, min 0) |
| Motor Rotation Time | Time to specific pose < 1s | Sequence of 20 random motor commands(θ1,θ2) | Takes ~3 seconds |
| Device Locator Accuray | Image validation accuracy > 75% | Manually set up 140 validation images, run through model and collect result | Avg 83.5% accuray in unmonitored environment |
| Device Locator Latency | RPi to server latency < 500ms | 5 simulated video stream transmission to server |
| Device Locator Accuray | Image validation accuracy > 75% | Manually set up 140 validation images, run through model and collect result | Avg 83.5% accuray in unmonitored environment |
| Device Locator Latency | RPi to server latency < 500ms | 5 simulated video stream transmission to server |
| Device Locator Output Position | ± 10 degree of the correct pose for each devices | 5 test video stream runs in different
environment with TV, Disco lights, AC…) |
|
| Device Locator | Total calibration time < 3 mins | 5 complete calibration runs in different
environment with TV, Disco lights, AC…) |
Worst case 103 seconds.
Normally avg 33 seconds. |
And the following are the test results:
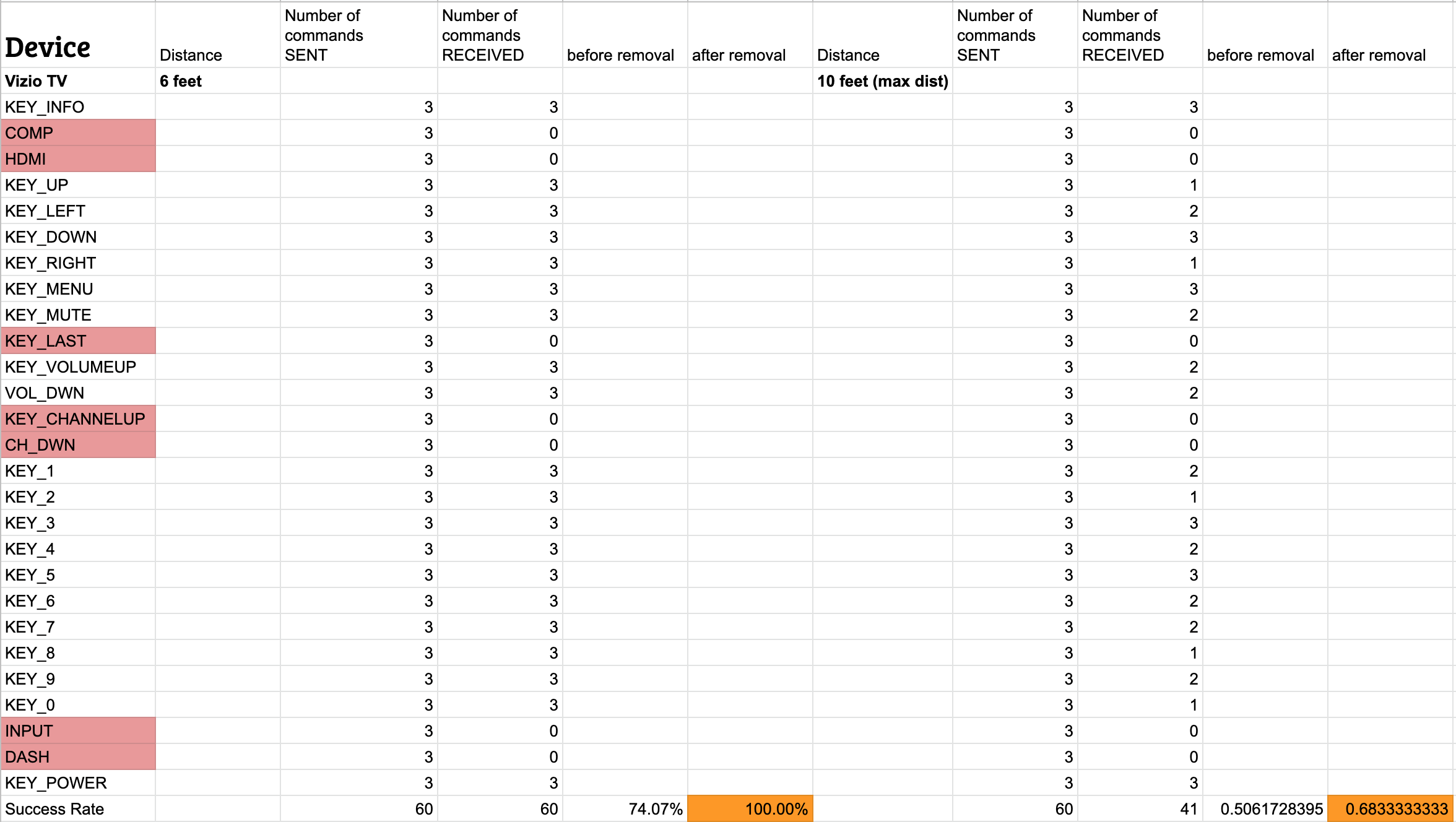
IR Vizio TV test results
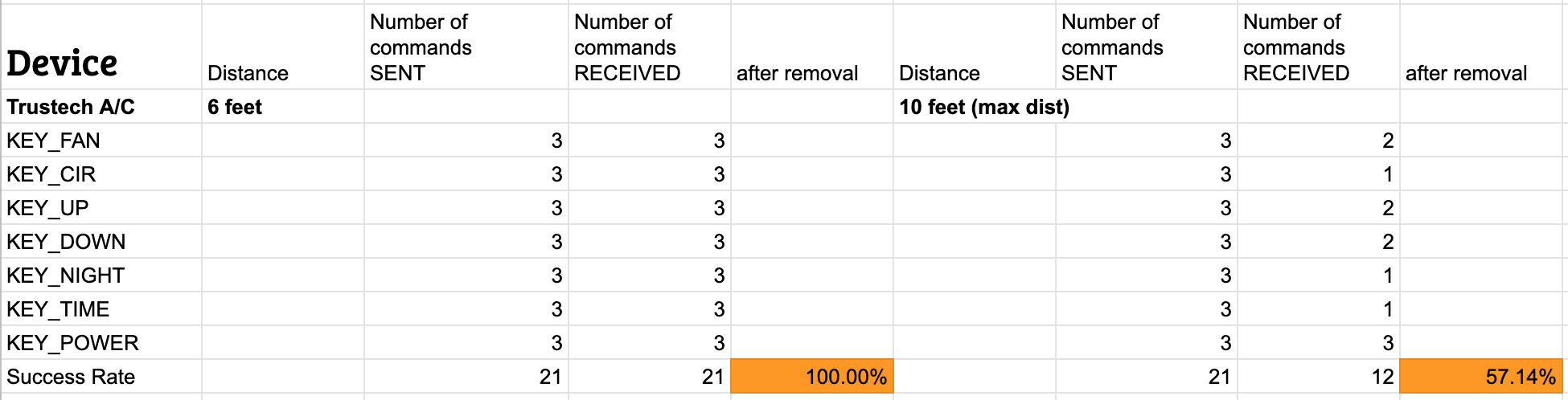
IR Trustech AC test results
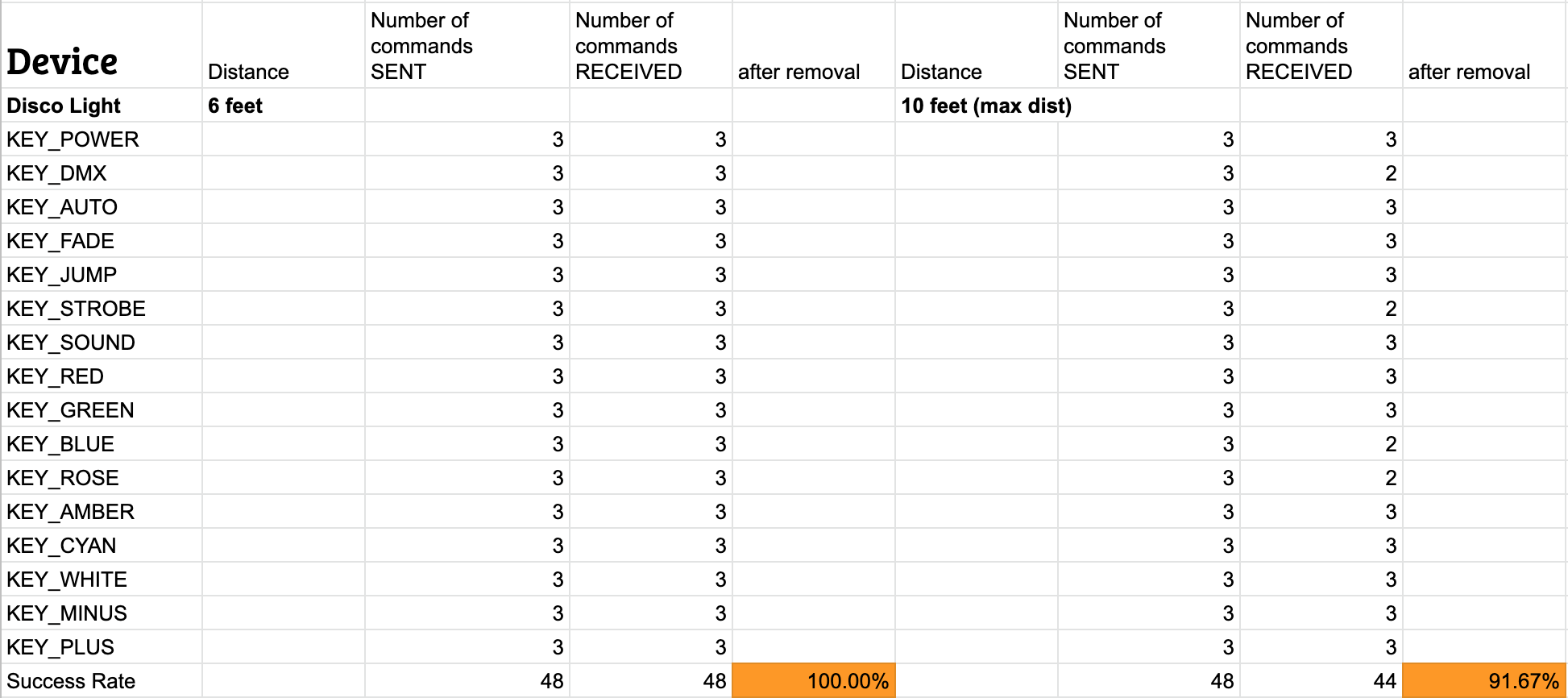
IR Disco Light test results
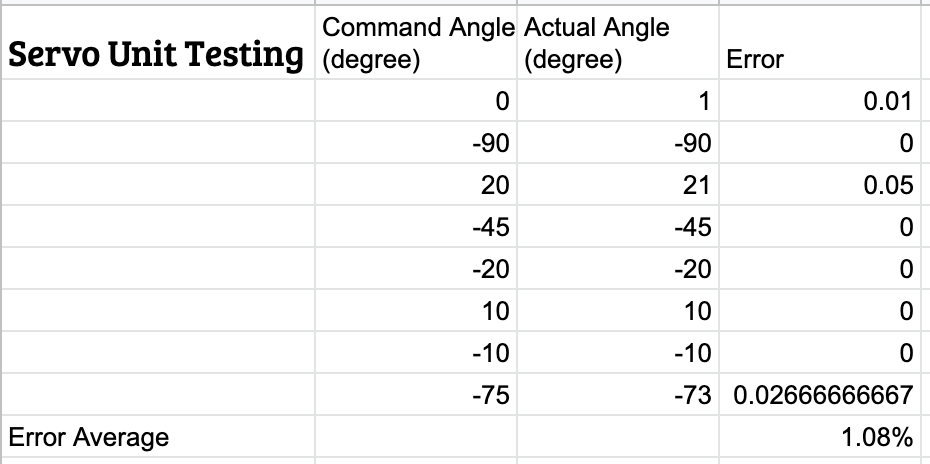
Servo Test Results
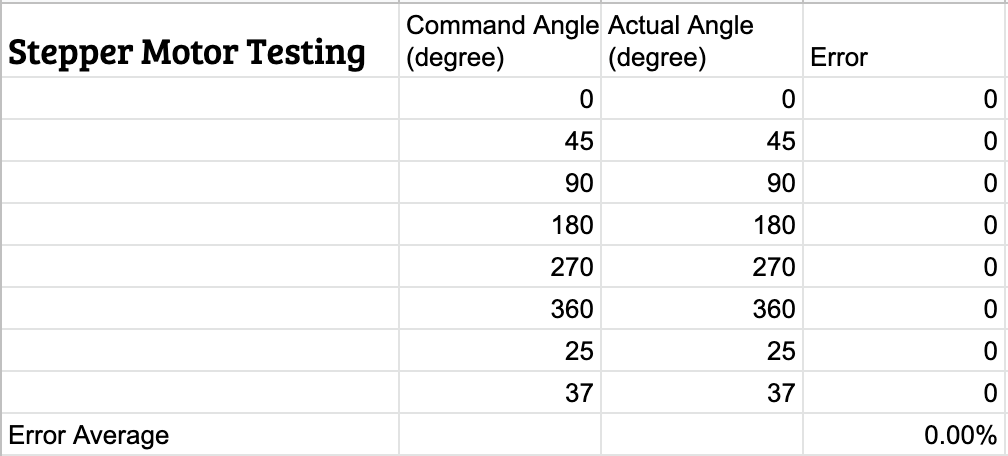
Stepper Motor Test Results

webapp server to rpi network latency (in ms), tested with a mock webapp server sending 100 messages to 10 concurrent simulated raspberry pi clients
The results were meeting the requirements we set!
Also check out our project video:
Schedule
This week’s development is on schedule. Although we originally set the Thanksgiving break as our slack time, we still worked diligently over the break to finish the project and do extra testings and validations. We really had a lot of fun in the process of developing IR Man. We can’t wait for its debut to the world.
Deliverables Next Week
- Fix RPi Network connection issue and start writing scripts in ~/bashrc
- Scenarios Modes and Programming
- Benchmark Testing and Metrics Reports for each MVP
- Work on final presentation and final documents
- Work on Making IR Man video
0 Comments