Progress
In week 13, as a team, we made extensive progress and the following objectives were done.
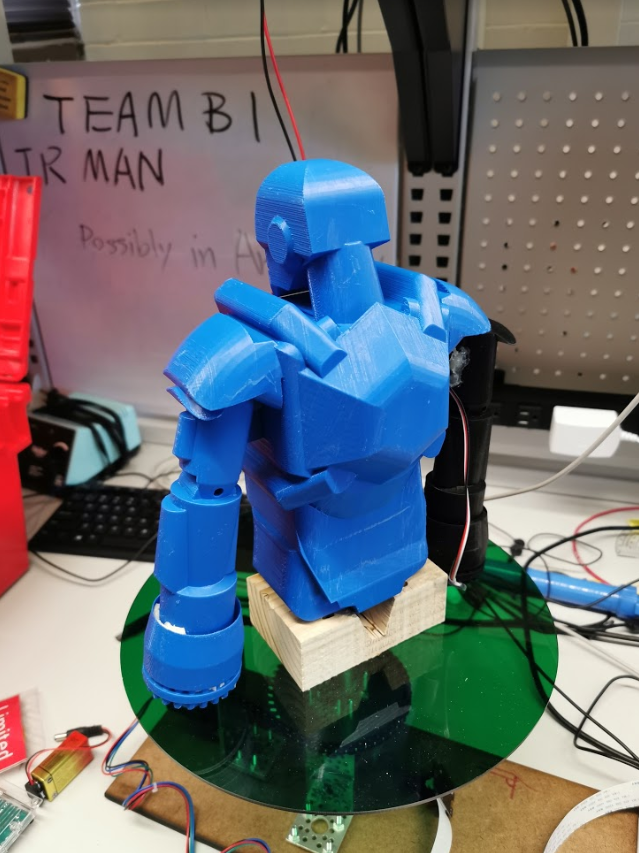
- All 3D printed parts done (IR Man Body Printed)
- Rotating Base Parts Manufactured and Assembled
- Initial Electrical Integration Testing Accomplished
- IR Man Servo Arm Attached to Body
- Client to GPU server async connection established
- Calibration Testing Done
- CV pipeline outputting accurate device location
- Recording more footage for development video! Stay tuned!
In short, this week, our IR Man’s physical shape is DONE, entire CV pipeline is also now up and running to map the device locations.
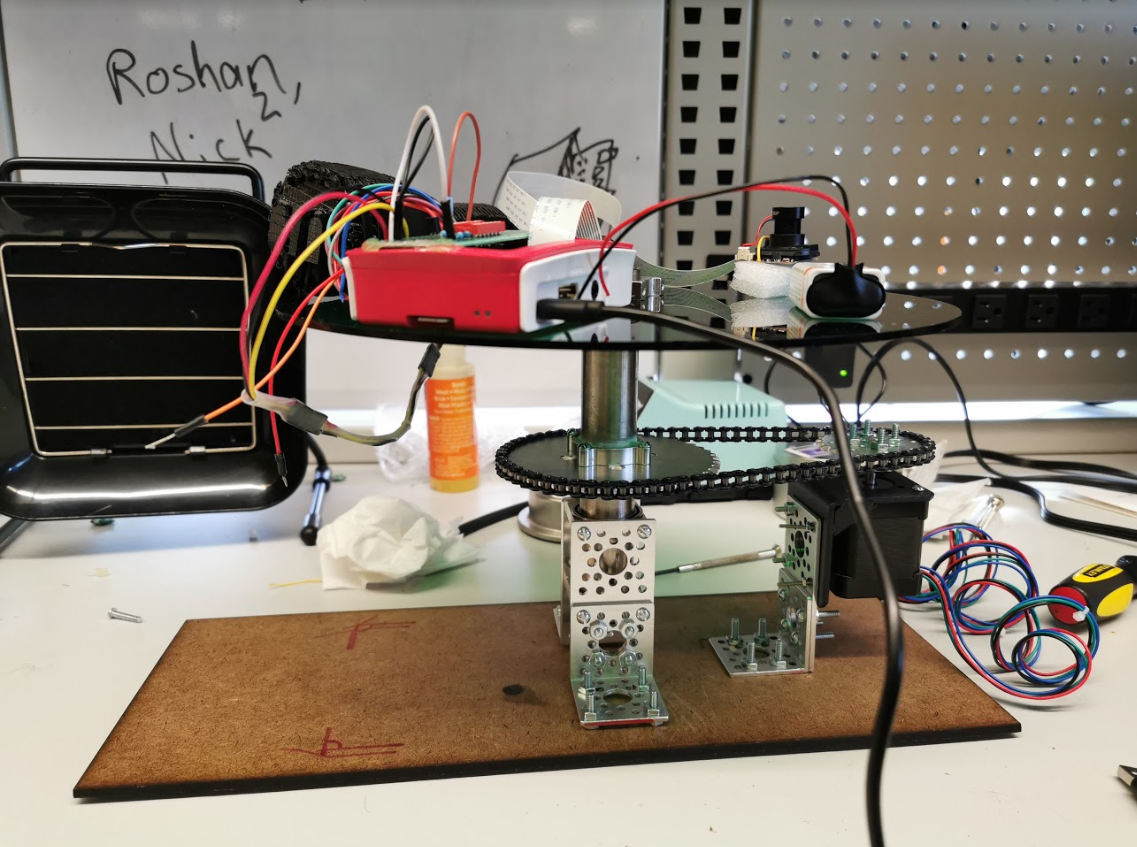
Rotating Base Assembly
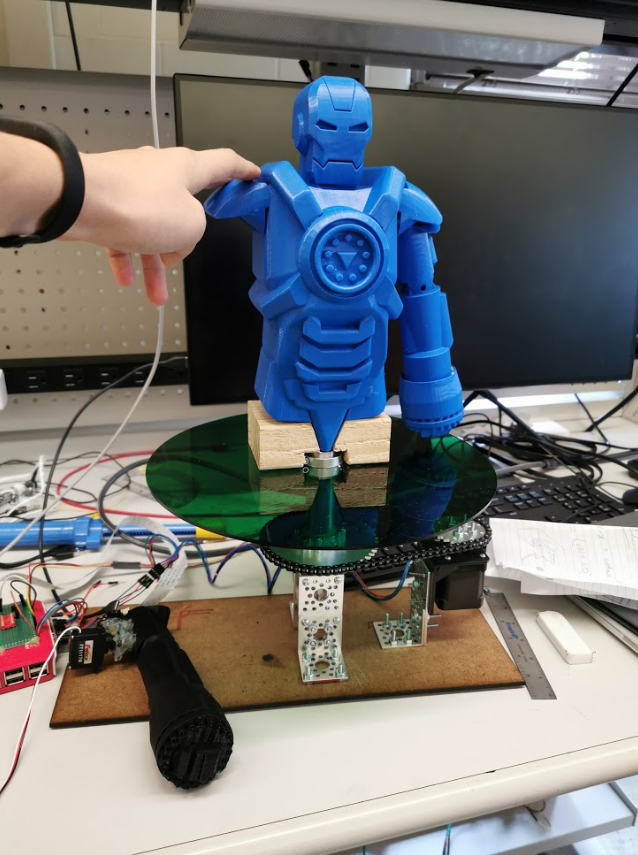
Initial Integration of IR Man Figurine onto Rotating Base

Here are some of the video clips showing the Rotating Base and calibration routine.
Results of calibration: all the registered device correspond to 2 theta values. One theta value for the motor on the rotating base and the other theta is for the servo arm angle. The results are pretty accurate but we will fine tune it with the final mechanical/physical shape of the IR Man because the location of the IR diode is still subject to change.
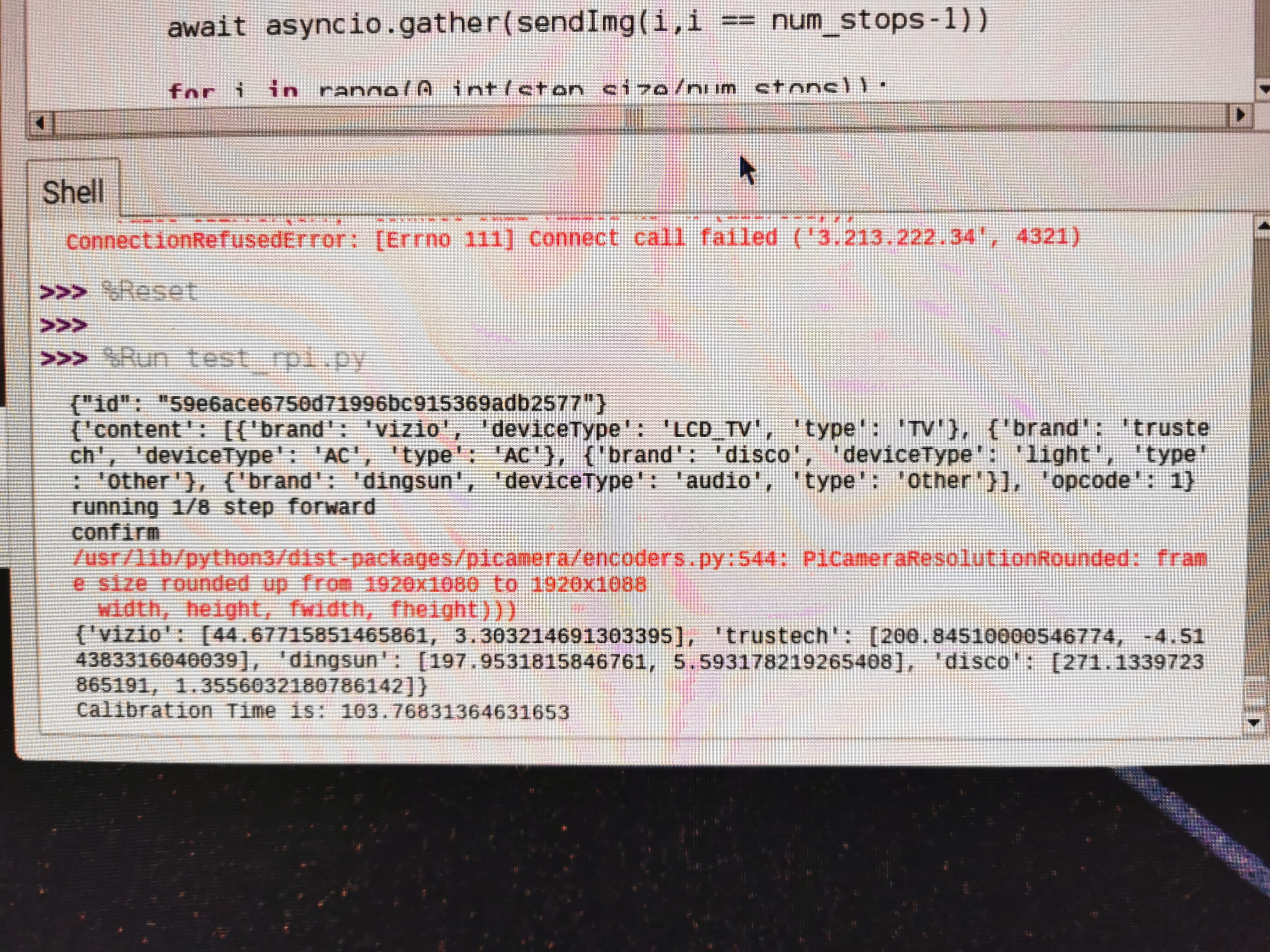
The total calibration time is 103.768 seconds. This is the result of making 10 stops for each photo, each stop for 5 seconds. Thus, the device inferencing takes about 50s to run. This result is about 2 times faster than what we originally set the requirements for.
Kudos to us for this week’s progress.
Schedule
This week’s development is on schedule. We have made very meaningful progress in Mechanical Integration and more importantly, we finally got the CV device locator pipeline to work. Stepping into the final phase of integration, we are confident that we can make IR Man come alive.
Deliverables Next Week
- CV Image Post-processing further Integration and Tuning
- Servo Arm Control and Motion
- Assemble with Slip Ring
- Figure out wiring and Power Distribution
- Strengthen all Mechanical Parts and Assembly
- Do Dead-reckoning on the motion
- WepApp user feedback and dummy-proof
- Communication protocol between GPU Server <-> RPi <-> WebApp Server
- Device location Storing to a local file
- Fix RPi Network and start writing scripts in ~/bashrc
- Scenarios Modes and Programming
- More Mechanical Parts Assembly
- Mounting all the wires, IR circuits, Cameras onto IR Man Body
- Paint IR Man with color
- Benchmark Testing and Metrics Reports for each MVP
- Work on final presentation and final documents
2 Comments
Jiaqi Zou’s Status Report: Week 13 – Team B1: IR MAN · November 25, 2019 at 6:46 am
[…] read more about the CV device location and calibration progress, please Read More in the team status […]
Jiaqi Zou’s Status Report: Week 14 – Team B1: IR MAN · December 1, 2019 at 3:54 pm
[…] read more about final integration and testing progress, please Read More in the team status […]