Updates for the week
I got the serial monitor to read the incoming bytes from the nodeJS and parse the data into a struct so that all functions can access this data. The relevant data is: action type, health level, and desired motor intensity. I worked on this integration with Bethel and tested playing the game to see if each relevant action would correspond to a unique light response, and it did which meant we could test the delay.
Afterwards, I integrated this code w with the light and motor control code and began testing it outside the vest. It worked then, but unfortunately, after we placed it inside the vest it didn’t work. There were some code changes when w placed it inside the vest so it could either be a wiring or software issue.
Aside from these primary tasks, I’ve also been laser cutting more boxes so that the wire systems do not come loose from the i2c or buck converter, helping strip/crimp the motors, and doing general integration with my team.
Progress On Schedule
The primary risk as of now involves the light and the motor timings, I realized that they are not occurring at the same time so I need to incorporate threads into the code so that it appears as though they are occurring at the same time. Of course, the user won’t see the lights, but this is to ensure that there is synchronization and the timings isn’t skewing off other queued up actions.
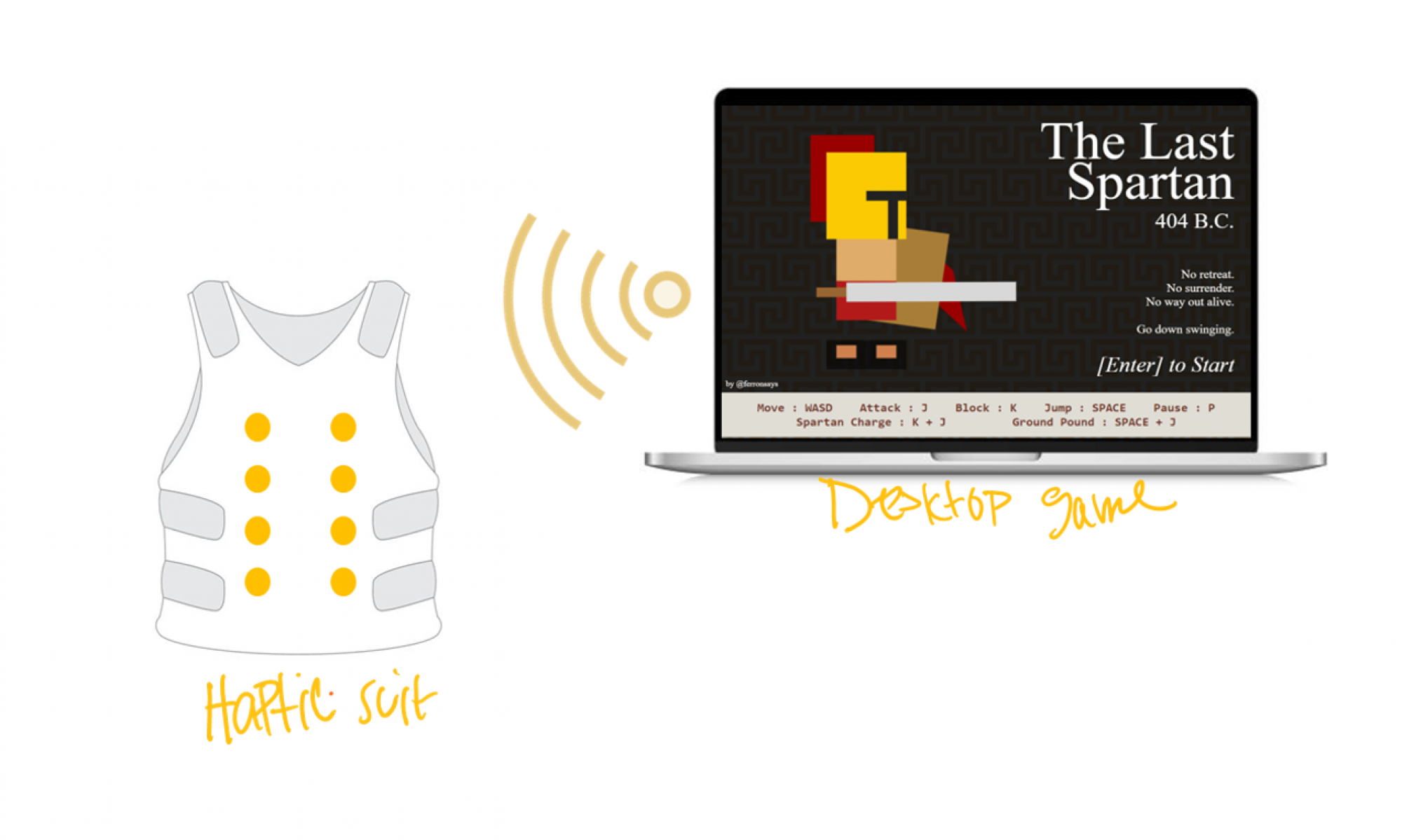
Unfortunately, Bethel and I couldn’t get wireless communication between the nodeJS and the wifiRev, so for the sake of time and completing integration, we decided to hold off on this until after MVP. We understand this means we will not pass one of our design requirements, but felt it was more important to have a finished product rather than a half complete system.
With this, I’m slightly off schedule as integration meant we discovered new problems that need to be addressed urgently. I hope to get back on schedule before finals week.
Deliverables for next week
As Gary noted, the vest light should incorporate some animations, so I’m working on animations for the getting hit action while also integrating with the team. I’m hoping this animation will be in the form of a random pixel turning on and the k pixels near it blurring until they turn off.
Moreover, the delay between each game action is extremely small, so I need to update the timing of the lights so that the corresponding light action has ample time to display, and isn’t just gone in a flash. This requires some tuning and playing around with the numbers till we get a delay that isn’t too small or too large. As mentioned above, I will also be incorporating threads into the integration code.
Finally, I will work with my team to finish the final powerpoint, and poster for the upcoming week’s deadlines.