This week as a group, we have primarily been focusing on two areas- learning and reflecting about engineering ethics and how it pertains to our project, as well as continuing to work on our project.
In terms of ethics, we think some of the more pertinent issues are how our traffic system could disrupt current social norms and lead to more dangerours outcomes in the long term. For example, if a crash is not detected, and people assume the automatic system would just work, they may not call the cops themselves as the status quo solution. Another pertinent issue is that of malicious surveillance as we are dealing with cameras that are used to track vehicles and other moving objects (including people).
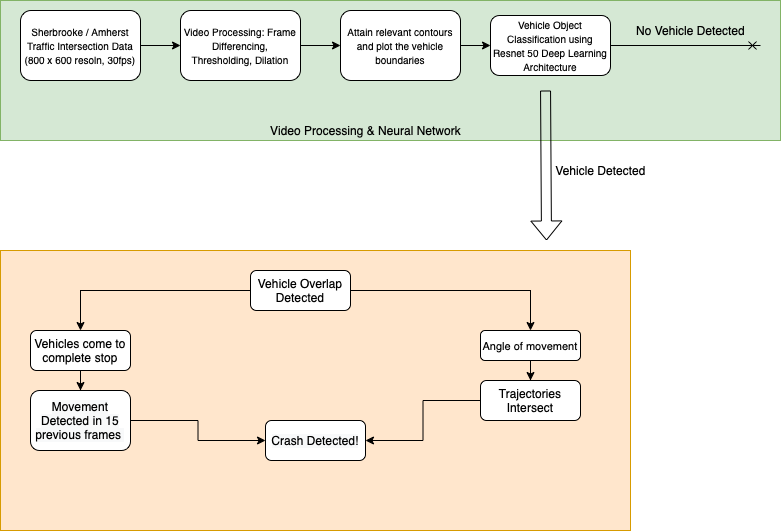
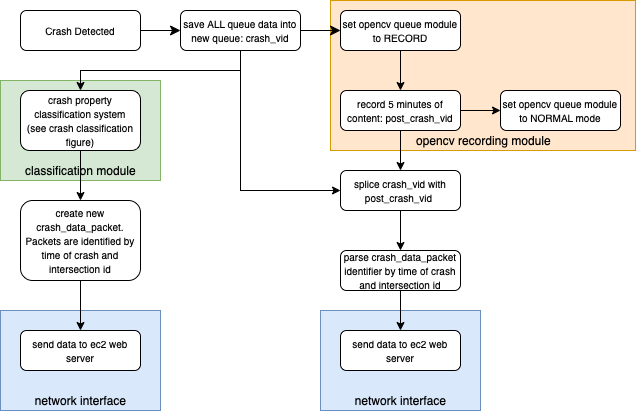
In terms of the project, we have made progress in both crash detection and rerouting, In crash detection we have been able to get outlines of the moving objects in frame, and are able to see when they overlap. We just need to keep track of the direction of movement to figure out if the vehicles are close together due to being on a collision course or they are just close together driving in two lanes in parallel directions. 
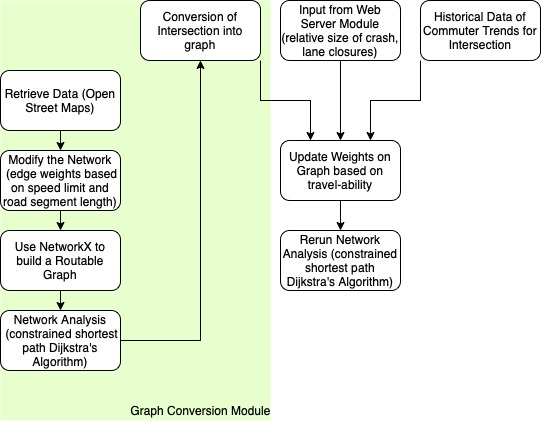
In terms of rerouting, we have a functioning system that efficiently reroutes given intersection location data. It is fully functional for up to 20 intersections. We are now also working on combining the different aspects of our project together,