This week I worked on further honing the object detection and tracking schema.
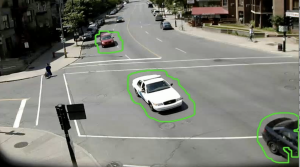
I utilized the MOG2 background subtractor algorithm which dynamically subtracts background layers to mask out moving vehicles. Shown below is a screenshot of this in practice. Using MOG2 works very well for our raw footage because the traffic light camera footage is from a fixed POV and the background is generally not changing. Additionally, We plan on using the masked image below to detect motion and then we plan on using the colored image (as it contains more data) to create the bounding boxes.

I have also made changes to how we detect / track our bounding boxes. This algorithm shown above will detect the vehicles but I am currently working on implementing a CSRT algorithm for tracking vehicles and using the colored image.