
For this week our group was finishing our last bits of testing on our whole system, and working on making sure our web server is working. We have also started working on making our final presentation poster. I have been spending my time specifically testing our rerouting implementation and different routes with more cars, and using this to create more graphs for our final implementation. I have also spent quite a bit of time refining our final presentation poster so we are ready for our poster session. Super excited to showcase everything we have accomplished!
Goran Goran’s Status Report – 4/23/22
For this week again our group was putting the finishing touches on our complete project, but we also have the final presentation coming up next week so a significant portion of our time has been dedicated to that. On the finishing touches side of our project, I have finished writing a script for our operators view or dozens of cars being rerouted at the same time. I have ported all of the information of all these possible routes for the cars, and run it through a few simulations. A case where routes are picked entirely randomly. the first route is picked. and a “best” version where the route with the least overlap is picked. Now I am just deciding how the best way to present this data is, whether it be graphical or what not. I am also in charge of doing next weeks presentation, so I have been making sure that I have an intimate understanding of all aspects of our project, including the portions I was not directly responsible. We are now starting to make our powerpoint and should have that done by Sunday night. Everything seems to be on track, I am excited to present everything we’ve accomplished so far!
Goran Goran’s Status Report – 4/16/22
For this week our group was mainly working on testing and refining our individual components as the deadline fast approaches. For rerouting that means that I have spent this week focusing on trying to create an operators view of the entire mapped area, showing how multiple cars are being rerouted. For now that means our goal is to have approximately 20 cars and their routes with respect to each other tracked and be able to show that their updated routing is improving their overall experience. In that regard I’ve run into several limitations for of the API software, since it limits me in the amount of requests I can make, my hope for creating a constantly updating map showing the routes seems to be a pipe dream. What I have been working on, and continuously tweaking is creating an excel document, showing each of the routes taking my the cars. I plan on cleaning up this data and creating visuals in the form of graphs showing changes in the travel time, and which streets are made more traffic heavy by the rerouting algorithm. So far everything seems to be going on track to make that happen by our Monday meeting.
Team Status Report 4/16
For this weeks status report, we are mainly working on testing and refining our algorithm from the object detection / crash detection side of things. The two problems we are working on improving is that we are getting a good amount of false positives due to larger bounding boxes from shadows and larger vehicles such as trucks. We are working on using only the center of the boxes to track the vehicles and using some kind of area thresholding.
With regard to the rerouting we are working on better simulating traffic. We are creating a simulation software script where we put in 20 cars with prescribed routes, and then compare how long they take to get to their destination after the rerouting vs before the rerouting assuming there is a crash that is an obstacle on their path.
Arvind Status Report 04/16
This week I have worked on continuing to work on advice given to us from our demo. The main thing I worked on was expanding the testing of our algorithm to more videos. Before we had 3 video clips that we tested our algorithm on. Now we have a set of 20 video clips that we have collected of crashes and tested our crash detection software on. They all work reasonably well. They all detect the crash, however there are false positives due to detecting larger bounding boxes due due to some factors in certain video clips. For example shadows and larger vehicles such as cars lead to larger bounding boxes for the objects tracked and so they easily hit other bounding boxes and trigger a false positive incident. We are working on switching the model to only consider the central point and include some kind of area threshold to determine intersections and crashes in the future to make the accuracy better for the future. We think the algorithm we have presently works well enough for a MVP, but we would like to improve upon our current design based on our test results on the video clips with shadows and larger vehicles.
Goran Goran’s Status Report – 4/09/22
For this week we spent the majority of the time making sure that our subcomponents are working seamlessly together. I spent my time making sure that our rerouting software was able to correctly and quickly receive and show updates on the generated map based on user input information. The rerouting is now able to work interactively with the crash detection aspects. I will continue to make use of some predetermined intersections spread around Pittsburgh and test to make sure that our software works robustly in all situations. For my focus on this coming week, I will attempt to make a operator view of our rerouting simulation, so that they can access and see all the different routes users are on to show that these routes are being distributed well without many issues.

Goran Goran Status Report – 4/2/2022
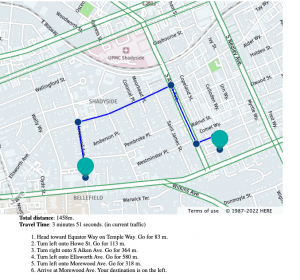
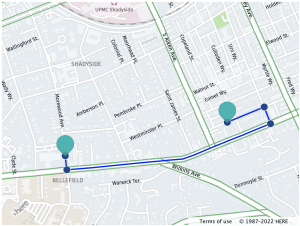
For this week in preparation for our “interim demo” (in quotes since Professor Kim is out of town this week), we have been trying to combine our different subsystems into one cohesive system. Although all of the kinks and features of my rerouting subsystem have not been figured out, what exists so far has been combined with everything else. At the moment the rerouting is able to constantly update based on information from the traffic light about the state of the road. It will provide the fastest route and give the user a detailed map, time to travel, turn by turn directions, and distance travelled. Anytime a crash is detected the map will automatically refresh in real time, giving a seamless user experience. For the future I plan on adding a simulation on top of the rerouting map for the operator to see cars traveling and how they are being rerouted by the system. Below is an image of the current rerouting at work.
Goran Goran’s Status Report – 3/26/22
For this week our group focused on the implementation of many of the ideas that we have previously been talking about. I focused on finally making use of the HERE Api system to actually achieve dynamic rerouting. I was able to get to the point where I can create a live server hosting the map data, which when given an origin, destination, and an intersection to avoid it will provide us with different sorts of routes that a car can take through traffic. In the future I hope to add more user functionality onto the server for the crash detection, as well as provide constantly updating simulation data for the operator. Just so that the operator will be aware of how traffic is flowing and the general trends that exist. There’s no point in rerouting if it just ends up causing even more delays in the long term.
Pre crash on fifth:
Post Crash on fifth:

Arvind Status Report 3/26/2022
This week I have primarily been working on the crash detection algorithm .I’ve gotten it working to the point where we having boundary outlines of the moving objects in frame. Here’s an example below: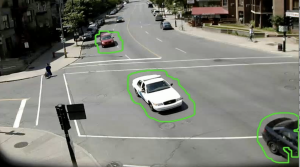
These cars are moving in parallel. There’s an example of a crash I put in the team status report.
The thing we need to fine tune is when we decide overlap of these boundaries are indeed a crash. What we are trying to do right now is using directions. When I detect overlap, i go back a few frames and track the movement of the object. This gives us a direction vector. If the two objects that are overlapping have similar i.e. parallel direction vectors then they are probably just next to each other in lane and it’s not a crash. If they are travelling in opposite directions i.e. perpendicular then we classify it as a crash. I think there’s still some fine tuning to do however in terms of leeway and getting the exact metrics right in terms of how much overlap and how perpendicular of an angle we require to classify a crash.
Overall we are a bit behind schedule, but we aim to catch up by the interim demo. I certainly want to get this working more robustly by then, and work with my team members to effectively interface with the other major part of our project which is the crash detection module.
Team Status Update 3/26/2022
This week as a group, we have primarily been focusing on two areas- learning and reflecting about engineering ethics and how it pertains to our project, as well as continuing to work on our project.
In terms of ethics, we think some of the more pertinent issues are how our traffic system could disrupt current social norms and lead to more dangerours outcomes in the long term. For example, if a crash is not detected, and people assume the automatic system would just work, they may not call the cops themselves as the status quo solution. Another pertinent issue is that of malicious surveillance as we are dealing with cameras that are used to track vehicles and other moving objects (including people).
In terms of the project, we have made progress in both crash detection and rerouting, In crash detection we have been able to get outlines of the moving objects in frame, and are able to see when they overlap. We just need to keep track of the direction of movement to figure out if the vehicles are close together due to being on a collision course or they are just close together driving in two lanes in parallel directions. 
In terms of rerouting, we have a functioning system that efficiently reroutes given intersection location data. It is fully functional for up to 20 intersections. We are now also working on combining the different aspects of our project together,