
This week I have been working on researching, testing, and prototyping the Python-Arduino interface for our project. Since we plan on controlling the screen functionality with Python, this interface is necessary in order to communicate the digital readings from the Arduino so that finger position can be determined. Additionally, we want to use Python to set the digital pins going into the decoder (see Matt S.’s diagram).
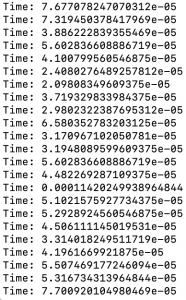
The most important part of my work this week was determining which platform/library was most suitable for our needs. Through my research, I determined the best interfaces were PySerial using Anaconda Prompt or similar, and pyFirmata. In the end, I found pyFirmata to be the best option because it is easy to use and felt more specific to Arduino in my opinion. The most important factor that I considered was if the interface would be fast enough to toggle through all of the combinations that we need. To do this, I tested how fast I could perform the standard Blink function on the Arduino by toggling digital pin 13 on and off as quickly as possible in a loop and recording the time that it took. A subset of the values that were recorded is included in the screenshot below. As you can see, the task usually took under 0.1 ms, although sometimes it took between 0.1-0.2 ms. Regardless, this should easily be fast enough since we are targeting a reading every 150 ms, and there will likely be less than 20 combinations per reading required in the end. This should provide sufficient time for the other calculations to be performed in each cycle. Finally, I was able to develop a small script that cycled through the combinations of D2-D4 pins that we plan to use (for now), as well as read from the D5 pin.
Overall, I am somewhat ahead of schedule on my tasks since we no longer deemed the simulation task to be necessary due to our switch from an analog approach to a digital one. We plan to adjust the Gantt chart to account for this, which will hopefully make our reach goal of multi-finger functionality more realistic.
Next week, I hope to combine my work with Darwin’s work in order to begin creating a Python code base for our project. Additionally, we hope to set up a basic physical circuit once our parts come in, so I will try to incorporate my work from this week into that.