For this week, I worked on our testing for the mat, poster and the box housing Arduino and the perfboard.
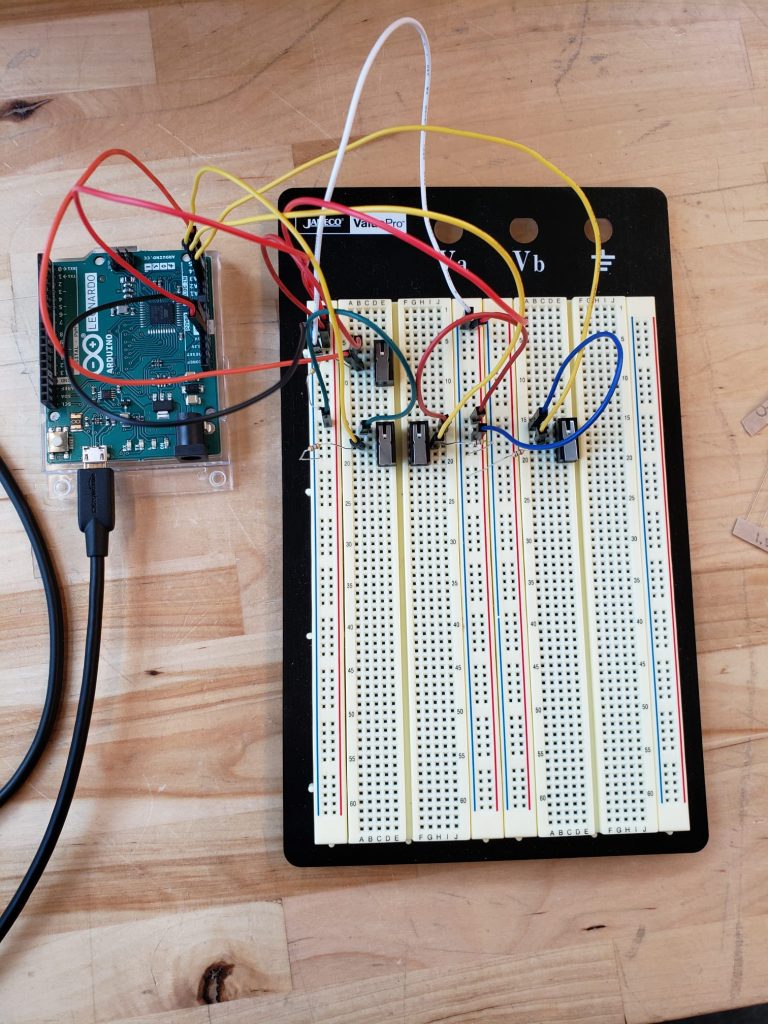
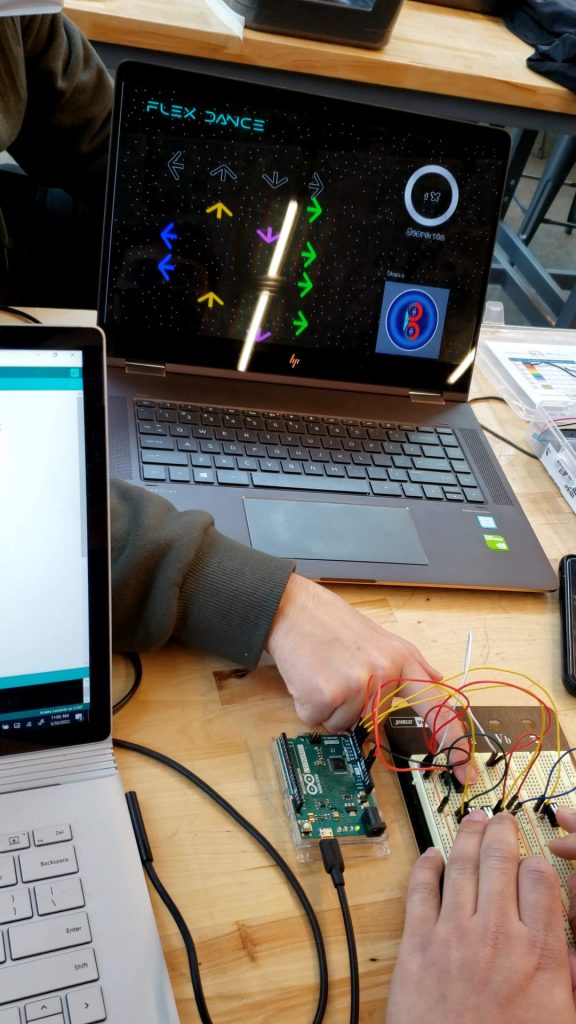
On Wednesday, we tested our game properly with everything working for the first time. While the game worked generally, there were many times where presses weren’t being detected. I worked on it to make it so that the Arduino calibrates the thresholds on startup. Caio helped me to get that code working properly. This seemed to help a bit but due to reasons mentioned in the team report, it still seems to be unreliable at times. A strategy we came up with to deal with this problem is to have a button that we ask the user to press before every game. This will set the thresholds according to what is measured at the time of the button press. We hope that this will make our game more reliable.
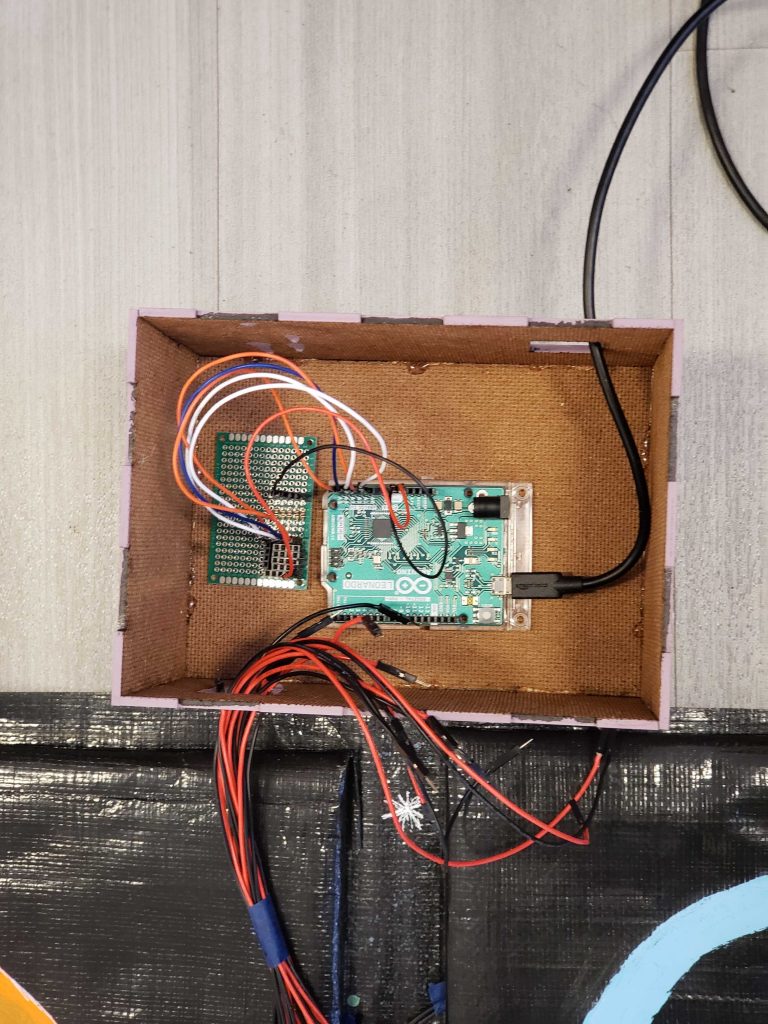
I also spent time on Friday working on laser cutting and putting together a big enough box to house our Arduino and perfboard. It has holes to let wires from the FSRs and the USB cable from the Raspberry Pi into the box. The Arduino and the perfboard will be fastened to the base of the box. It’s pictures are shown below. Big thanks to Spandan for putting in the time and effort to paint the box and make it look beautiful!
The rest of the time in the week was spent on designing and writing some of the content for the poster.
For the last week, I plan to implement the button press to let the Arduino calibrate the thresholds. Other than that, I will be working on the other submissions for our project.