Currently, the most significant risks that could affect us come from integration. We all have been working on our individual subsystems mainly, and so far we haven’t had any catastrophic issues (which is a good sign), but we haven’t tried to do any integration. Some things that could happen are the motors aren’t strong enough for the strainers, the Arduino’s can’t communicate through the Jetson Nano, or the UI doesn’t work/doesn’t come together. To mitigate these, we do have several backup plans in place. If the motors fails, what we will end up doing is scrap that portion, and instead have some alert to tell the user which strainer is done, so they can manually lift the strainer themselves. If the communication between the Nano and Arduino doesn’t work, we may have to scrap the Nano, or try to make everything work through the Nano, since that’s where all of our CV is. If the UI doesn’t work, then we will just have to scrap that and not have a way to really adjust any of the strainers. We are managing all of these by just testing all of our individual tasks, and making sure they work. We are also trying to do the integration in small doses and soon, so we have time to execute one of our contingencies.
There were no major changes to our system, just a few minor, more cosmetic changes or just some added stability.
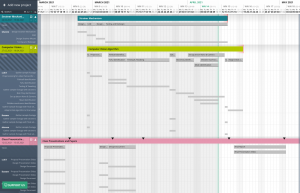
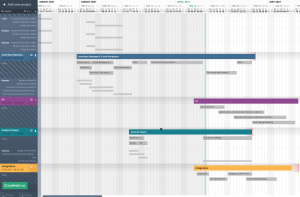
Our schedule also hasn’t changed in any significant way. We switched a few things around, and edited the timeline to more reflect what we’ve accomplished so far. See the images or linked pdf below for the updated schedule.