
This week I worked on the assembly of the drone apparatus, the calibration of the sensors and the integration of the state estimator into the simulator.
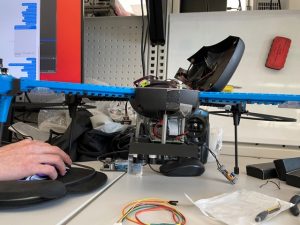
First, I went into the lab with the group to gather hardware and assemble the sensors and camera onto the configurable mount we 3D-printed. I finished mounting all the sensors and the Raspberry Pi, tested the tolerances, and ensured we had enough space for all the wires and the ribbon cable. Here is a picture below:
I also modified the CAD design to include the entirety of the IRIS drone rather than just the bottom shell. This is important because in order to convert the 2D image coordinates to absolute 3D coordinates, we need to know the exact position and pose of the camera relative to the internal Pixhawk 3 flight controller. Thus, I also added a CAD model of the flight controller to the assembly in the correct position so we could properly measure the position and pose in order to calibrate the drone’s sensors. This final 3D assembly can be found as “Mount Assembly 2” in the Drone CAD subfolder of the shared team folder.
Finally, I worked with Alvin to integrate the state estimator into the simulator. First, I had to modify the state estimator to work with 3D absolute coordinates rather than 2D pixel coordinates relative to the position of the drone. In order to do this, I added a z position, velocity and acceleration to the internal state model and modified the transformation matrices accordingly to account for this change. I then debugged the estimator with Alvin as we integrated it into the simulator in order to track the simulated red cube across a variety of different motions. A demonstration of this can be found in kf_performance.mp4 in the share folder. The target red cube’s position is marked by the thin set of axes. It accelerates and decelerates in extreme bursts to simulate a worst case (physically impossible) target motion. The noisy measurements captured by the camera and target detection are modeled by the small, thicker set of axes. Finally, the smoothed out motion from the state estimator’s motion plan is modeled by the larger, thicker set of axes. While the motion plan drifts slightly when the target accelerates rapidly, it does a successful job of smoothing out the extremely abrupt motion of this cube.
For next week, I plan to work with the team to get the drone fully into flight. I plan to help Vedant write the scripts for ROS communication between the RPi and the TX1 and finish calibrating the drone’s internal flight sensors with Alvin.