
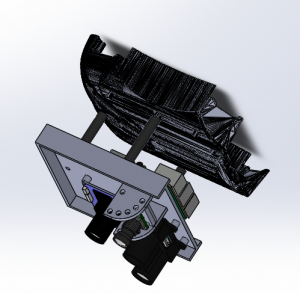
For these weeks, I first started the CAD design process for the drone mounts. I had to design a mount which could be attached to the underside of the drone and house the Raspberry Pi, sensors for the drone (a LIDAR and a PX4Flow camera) and our camera for taking video. The camera position had to be adjustable so that we could modify the angle between test flights and figure out which is optimal. In addition, I had to make sure there was enough clearance for each of the ports on the sensors / Pi and that there was ample room for the wires connecting them. The .stl files are in the shared folder. Here is a picture of a mockup assembly of the mount attached to the underside of the drone:
After asserting the design seemed to work in the assembly, I scheduled the parts to be printed (along with a few other drone guards we found online). The parts were successfully printed and I started the assembly:


In addition to this, I modified the state estimation algorithm to handle asynchronous datapoints. Rather than assume that updates to the drone’s state and the target’s detected position come together at a set fps, I modified the algorithm to handle asynchronous updates that are tagged with the timestep they were sent out. Since the algorithm requires the drone and target updates simultaneously, when one is received without the other, I predicted what the state of the other would be given its last known state and the delta t. Using this, the algorithm then updates its model of the target’s/drone’s movement.
Finally, I also helped Vedant try and get the camera working with the Raspberry Pi 3. We figured out that the kernel version of the Raspberry Pi 3 did not support the IMX477 camera and even though we tried an experimental way to update the 3’s kernel, we eventually decided we needed to get a Raspberry Pi 4 instead since this experimental update caused the 3 to stop booting.
For next week, I intend to start integration with the team. We will finish assembling the drone mount and I will help create the main function on the TX1 that integrates my state estimator and Vedant’s target detection. After this, we will test the communication between the TX1 and RPi and hopefully try a few test flights.