
I met up with Sid to help install the Jetpack SDK on the TX1 as well as install ROS, but weren’t able to finish the full setup due to a memory shortage. I also helped build the design review presentation for this upcoming week.
This week was extremely busy for me, and as a result I didn’t accomplish the goals I set last week: namely setting up a software pipeline for the motion planning and actually testing on the simulator. What I did instead was set up the drone’s flight controller and double-check that my existing drone hardware was all ready for use. The drone and flight controller already contain the bare minimum sensors to enable autonomous mode:
- gyroscope
- accelerometer
- magnetometer (compass)
- barometer
- GPS
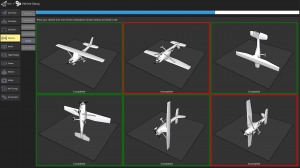
I used the open-source QGroundControl software to calibrate these sensors. The accelerometer calibration is shown as an example below:

I also wired up other sensors to the drone’s flight controller:
- downward-facing Optical Flow camera
- downward-facing Lidar Lite range-finder
This next week, I will finish installing the communication APIs on our Raspberry Pi to communicate with the flight controller and verify its success with ROS by sending an “Arm” command to the drone. I will also finish last week’s task to set up an initial software pipeline for the motion planning.