Haohan Shi
This week I mainly worked on finalizing our project and making improvement on our demo experience.
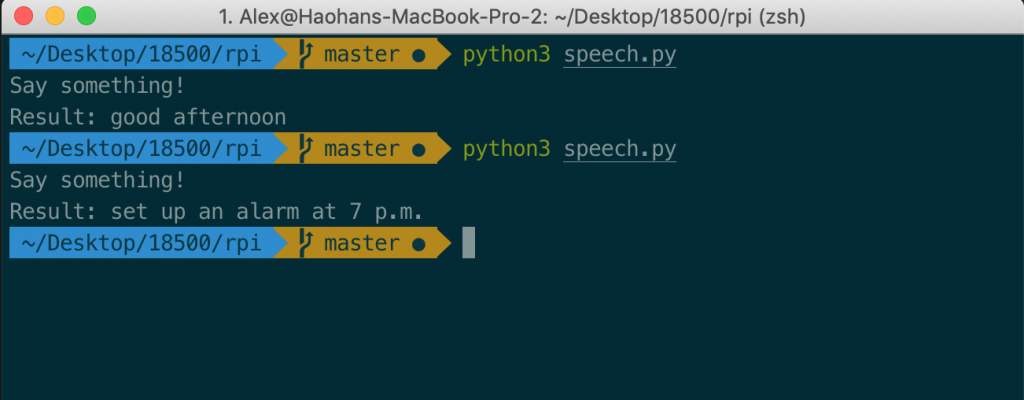
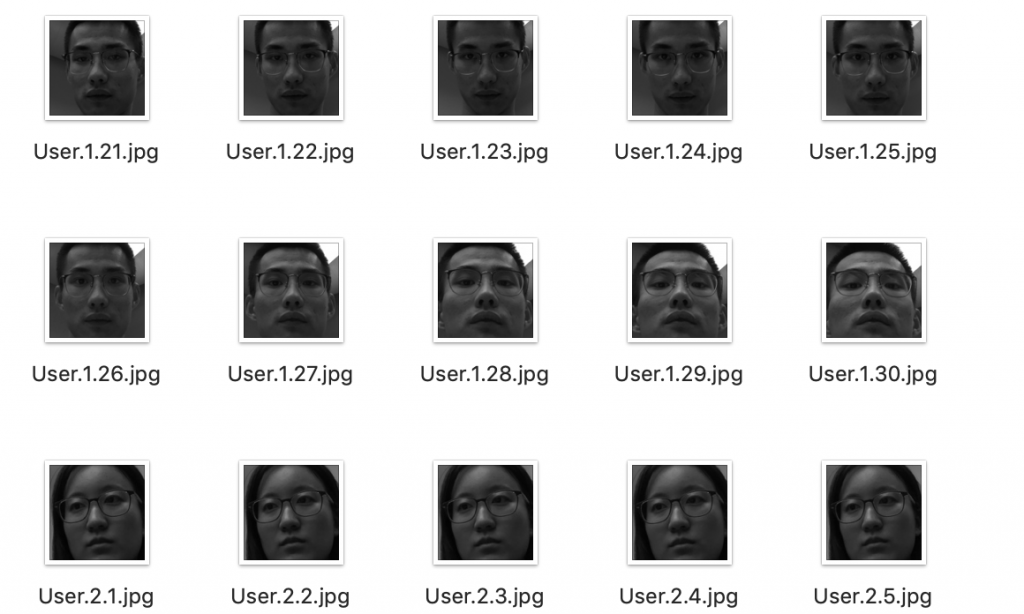
First I made further adjustments to our hotword detection model so that it not only worked on my voice but also worked on the other teammates’ voices. Also, I made adjustments to our code flow so that every time the robot can’t understand the input command, it will directly ask for a new command instead of waiting for hotword detection.
Also, I added voice commands so that we can turn on/off facial recognition by voice commands so that we don’t need to adjust code during demo day.
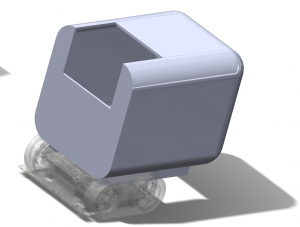
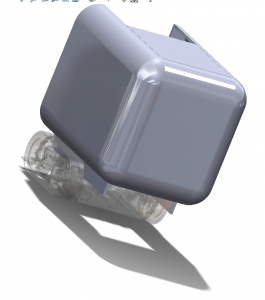
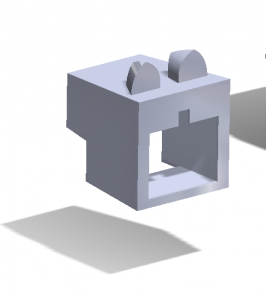
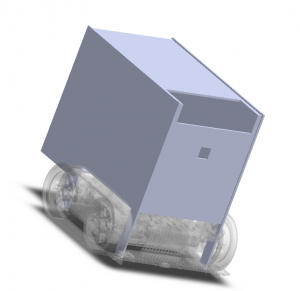
Finally, I adjusted our robot case, especially head angle so that the camera will face towards human faces directly given the height of our demo table.
Yanying Zhu
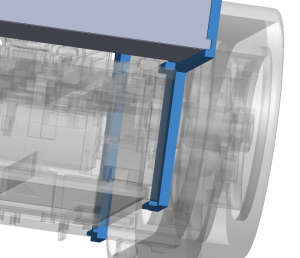
During the last week, we majorly worked on finalizing the appearance of the robot as a team. The major challenge we solved is to stabilizing weights of the components in the robot case so that it doesn’t mess up the center of gravity and disrupt moving It has been an issue when we kept adding weights on to the robot.
I also did some minor fix on the code that involves serial communication with the pi. As we are approaching the end of the term, we are also finishing the rest of the testing on movement, facial recognition for documenting and analyzing in the final report.
Olivia Xu
The last week of our capstone project consists of testing every function to decide if we want to include it in the final version. One problem was the robot was tipping over with all the components, especially the heavy portable battery, inside. I made new parts out of foamcore to act as an internal support that stops the components from shifting towards the back. I went ahead a spray painted the outer case into a more aesthetically pleasing black. The matte effect covers up the 3D-printed imperfections.
Team Stautus
We are ready for demo!



 made a time display
made a time display