
Haohan Shi
This week I worked primarily on adding additional supporting commands for our robot and start working on the facial recognition feature on Raspberry Pi. Also, I helped with the design of the appearance of the final robot, such as where to put each component and what’s the dimension of each part.
There are three main features that I put into this week. First is time display, which is to get the current time in current timezone and translate it into audio and corresponding lcd display. Second is the weather information. We used a free API to get temperature, current weather, etc, and pass this information on to the lcd display. The third one is the automatical/manual stop when listening to the user command or when the user specifically tells the robot to “stop moving”. This involves serial communication between the Pi and the robot.
Olivia Xu
This week I focused on getting a case for our robot. Out of customizability, weight, and appearance considerations. We’ve decided to 3D print a box. I’ve measured around our robot with all its expected parts connected (RPi, portable charger for RPi, LCD, camera, mic, speaker) and downloaded the CAD file for the Zumo robot and started constructing the box in solid works. Knowing the approximate space above and behind the robot, I’m going to make side panels with small ledges to clip onto the robot, connected front panel, and slide-in back and top panels. Also, there needs a way for RPi to sit above the robot, we could use mounting screws or I could organize slide-in slots for more panels inside the case.
Yanying Zhu
So as demoed in lab, meobot is able to complete stay at a wandering state as it moves, stop randomly, avoids obstacles and edges on the table. Serial communication with raspberry pi is also set up so that meobot stops when serial command is received and resumes to this self-moving when raspberry processing ends. There is a small bug in the current self-moving state that if it is in the process of turning it is not able to edge detect. This can be fixed next week.
Another major thing that I will be working on in the next week is adding more features to the movement system. One possible feature is following people. We discussed on following people using face recognition before, I think I can do a basic version first, which is follow people using sensors.
Team Status
After discussion, we have the following changes to our schedule
Original:

New:
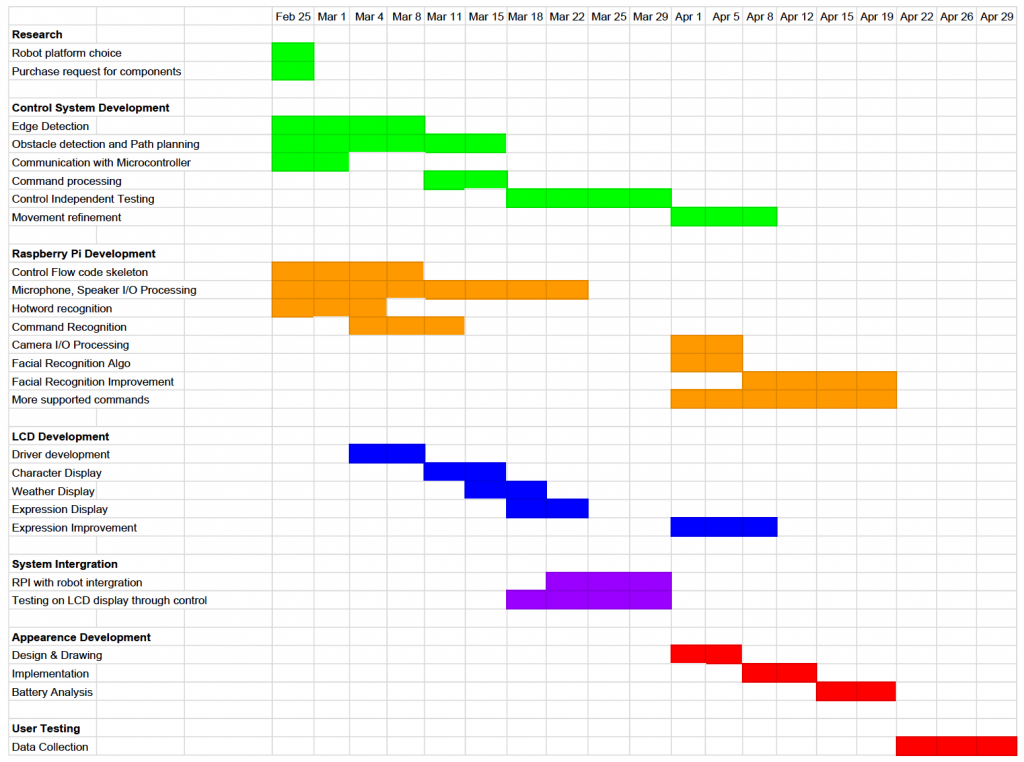
We moved the facial recognition part after the interim demo so that we can have time to polish the existing features, and we will start working on the outer appearance design next week.