Karthik Natarajan:
So, after last week I worked more on moving the zoom servos. Specifically, I was able to use the stepper motor library provided by CircuitPython to get focus servo to move one step at a time. We did it specifically one step at a time because CircuitPython only supported moving single steps. But, as more time went on we realized that there were two problems with this. Firstly, the stepper motors tended to be pretty hot because of continuously starting and stopping after attempting each step. Secondly, because the stepper motor only moved one step at a time, we weren’t able to move the stepper motor as fast as we wanted to. Because of this, we decided to re-implement the stepper motor library as mentioned above in Jerry’s status report. After this, I decided to test the library on the zoom lens. As of right now, we are still in the process of testing that but we have ensured that the new library still keeps all the necessary functions from the default stepper motor library circuitPython. We will have more information about this on Monday.
Jerry Ding:
After spending much effort on this and looking carefully at the board schematics, it looks like it’s hard to further decrease the Ultra96 board’s power consumption below 2W without fully shutting it down. Though I’ve successfully gotten the processing system (CPU, memory, power management unit) and the programmable logic powered down (and confirmed this with debug prints), the remaining peripherals still consumed a non-negligible amount of power.
Instead, we decided to follow a backup plan and fully power down the system every time. The original boot time was over 20 seconds even with a relatively simple hardware block diagram but by disabling kernel features, optimizing the u-boot bootloader, compressing the kernel image and moving the PL programming step to a later step, we were able to get this down to 5 seconds.
Though taking time to boot up is suboptimal, we believe it is still not too difficult to meet our originally stated goals of zooming into a person up to 20 feet away subject to a variety of paths and lighting conditions. Our microwave sensor’s range is rated for 53 feet, and we have two sensors to get essentially a 180 degree field of view, so there will be plenty of buffer distance to work with. In addition, I looked at many example videos of package thieves, and they usually are not running or in a particular hurry on their entry path (possibly to avoid looking suspicious). Five seconds after motion is detected, the person should be easily filmed. Though a longer detection range will cause more false positives, the fact that no power is being consumed in the off state at all will make our power budget easier to work with.
In addition to this work, I wrote an alternative version of the CircuitPython stepper motor library code to allow multiple steps in one function call. I made sure that the minimum amount of Python code will be executed between each step, and wrote a good number of unit tests to make sure that my version of the library behaves identically to the original. Once the stepper motor work is done, there shouldn’t be much left except polishing the user-space applications for a smooth product.
Nathan:
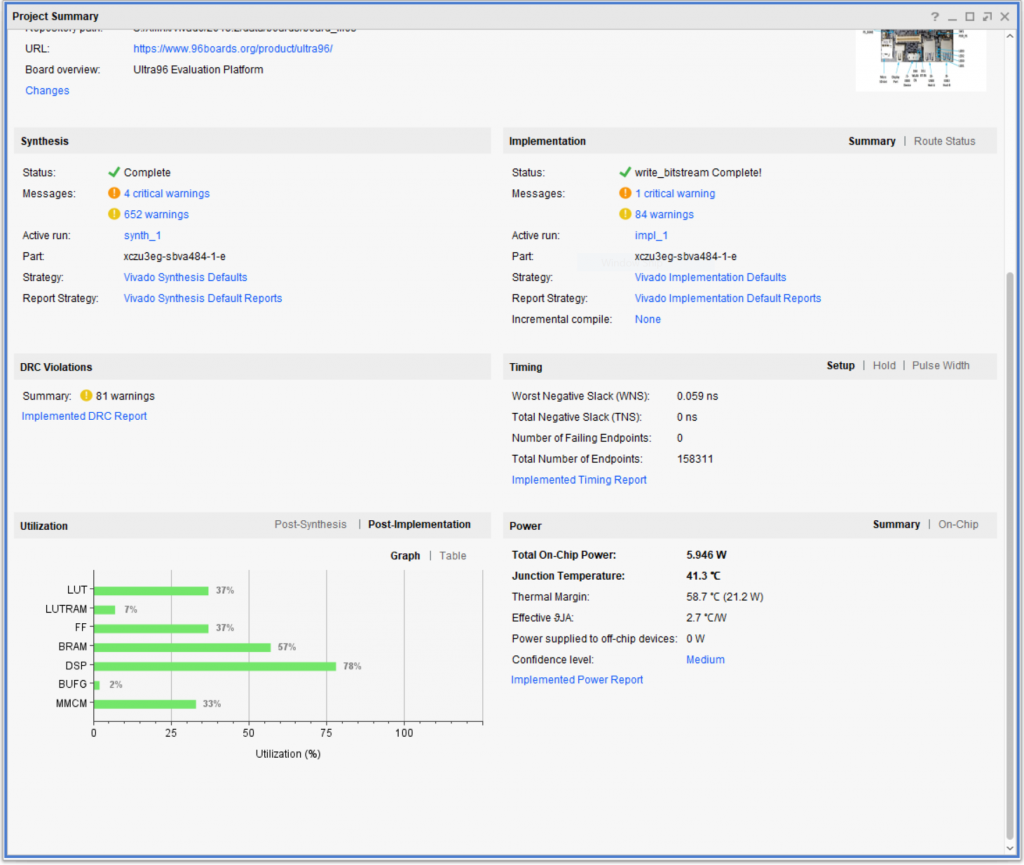
I’ll start off with an update from last week. It took longer than I expected, as Xilinx’s documentation was missing a few steps (connecting some of the clock, reset, AXI signals, and a few minor functional blocks), but I completed the DPU build. You can see my design layout below.
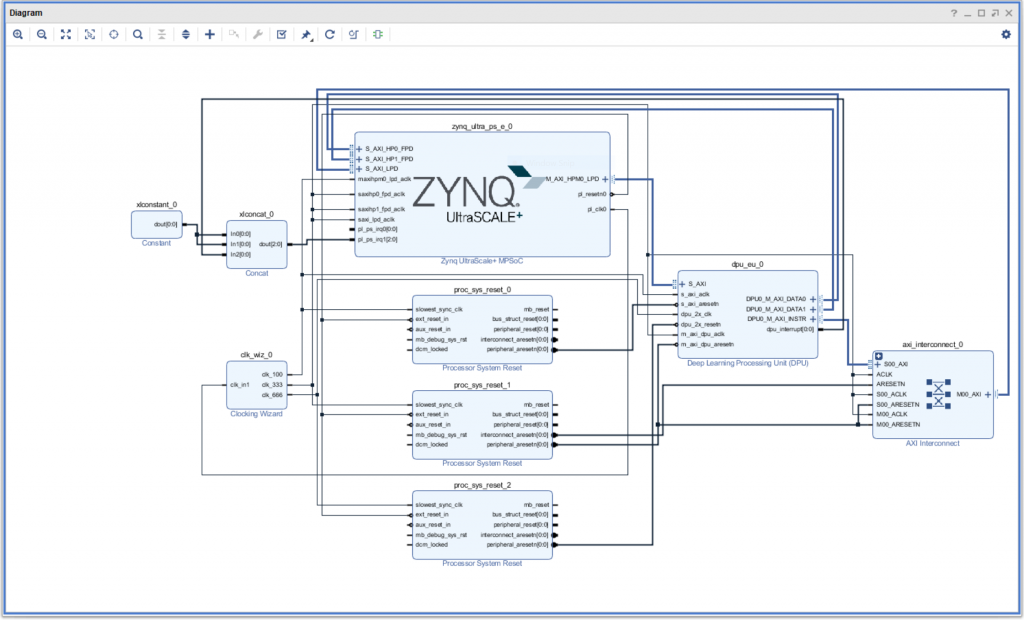
I used the B1600 core as a “middling” size implementation of the IP. You can see some of the parameters in the attached image. The current problem I’m struggling with is some sort of timing difficulty. It has trouble reading a timing file and reports that some part of the design does not meet the timing criteria. I’m convinced these two issues are related, so over the next week, I will be working in Vivado to get this fixed and suitable for implementation on the FPGA. Additionally, I’m working on the enclosure, but in light of the more pressing Vivado work, have pushed it back by another week. I’ll meet with Professor Nace if he’s available and ask about what I have access to in the Makerspace and get started on fabricating the basic components.
Team:
Our biggest ongoing concern as a team is the difficulty getting the board to go into a deep sleep state. While we’ve been able to suspend most activity, for reasons unknown, the board still consumes a substantial amount of power. To address this, we’ve decided to split our efforts into two direction. We will continue to try to fix the sleep behavior, while also working on reducing the boot time. While not exactly ideal, if we can get the boot time low enough, the range from our motion sensors should allow for the system to boot up before someone reaches the package, and thus we will maintain our functionality.
Another thing we’re waiting on is the C920’s enclosure from Kurokesu. It’s in shipment, and should ideally arrive within a week or so, but we do not have a confirmed arrival time as it stands. If it’s late we will need to work quickly to get it implemented in time for the end of month demo, but based on the average shipment times, this should not be necessary.
Our only major schedule change for the week is pushing back the enclosure fabrication, but there is some extension to the tuning of the power system, testing of zoom, and DPU implementation. All schedule changes are maintained in the Gantt chart, with the link provided here again for convenience: https://prod.teamgantt.com/gantt/schedule/?ids=1467220&public_keys=0rh40k2Z0hkS