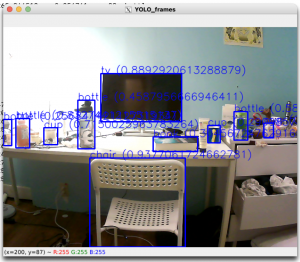
This week I continued fo work on integration. The Jetson has continued to give me trouble. After exhausting my options for install of pytorch vision that would work at runtime, I decided to start from scratch. I had already followed the instructions for install from scratch Pytorch.org, YOLOv5, NVIDIA Developer website and the NVIDIA forums with no luck. I sat down with Adnan and Prof. Tamal to help me debug my current issues. I had a feeling there were some compatibility issues between library module versions, versions of python and versions of jetpack. After reflashing I decided to use the latest version of Python that was supported by Jetpack 4.6.1 which comes preinstalled when you flash the Jetson. I was very meticulous with reading the installation pages and finally managed to get YOLOv5 inference to work on the Nano! This is a big win for me as I have been trying to set this up for weeks. It can take a photo with the USB camera, do inferencs and output the bounding boxes and object labels. Unfortunately we had run into a new road bump. Our Django app is written for version 4.1 but Python 3.6.9 only supports 3.6 of Django. Our existing code will need to be rewritten to support 3.6.
Output from USB Camera and YOLOv5 — all done on Jetson