
This week I worked on editing the PCB board and fabricating a glove with a temporary circuit for initial testing.
It turns out that the PCB I had designed had traces that were too small for power signals and vias that were also too small. I readjusted the design but I have not been able to order it yet. I will order the PCB by the end of the weekend.
All of our parts came in so I began building the circuit on some perf board. I wasn’t able to complete the circuit by today, but I will have it finished by the end of the weekend. I will also sew in the flex sensors by the end of the weekend. Below is a photo of the semi-complete circuit:
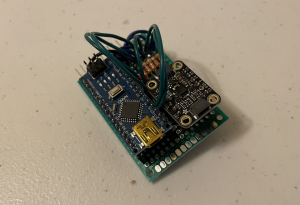
We are on schedule still since we came up with a contingency plan for me being unable to order and receive the PCB quickly enough. Building the circuit on perf board will allow us to test collecting streams of data.

