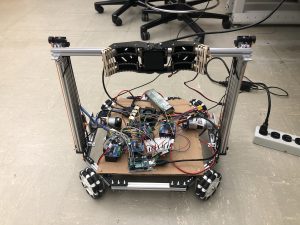
At the beginning of the week, I implemented the motor control code for the wheel chassis on the robot. The following video was performed during the interim demo.
After the demo, I worked with Esther and Bhumika to integrate our subsystems. I first experimented with the relationship between the motor spin time and the distance it would travel. The robot can accurately travel a specific small distance without much drift in all directions. Then, we incorporated the computer vision subsystem to work on various navigation sub-components. The robot can move towards an apriltag from an initial position at a tilted angle. The robot would first rotate to face parallel to the apriltag, center itself horizontally, and then move towards the apriltag, based on the location and angle coordinates of the camera. The other subsystem we worked together as a group is laser pointer recognition, centering the robot to the tagged object, and then moving forward towards the robot. Next week, we would add an IMU sensor for more precise movement of the robot in case of drift, and work on the remaining subcomponents: retrieving the item from the shelf and returning to the basket.