
This week I was able to start working on the camera and Jetson Xavier setup. We got the Xavier setup earlier in the week, and I worked on getting the Intel RealSense Viewer setup on the Xavier. Once that was setup, I worked on downloading the necessary Python libraries on the Xavier that are needed to use the Intel RealSense data. That took me some time as I ran into many errors with the download but, the library is now set up.
Once the viewer and the library were setup I began working on actually using the camera’s stream. I ran many of the example scripts given on the Intel RealSense website. Two of the more useful scripts that I was able to run were a script for detecting depth of object in the stream, and a script for using depth image to remove the background of an image. The results are shown below:
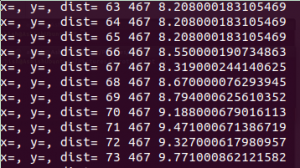
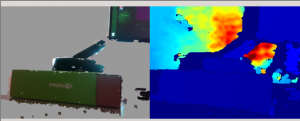
The first image shows the result of running the depth script, which returns the depth of a pixel in meters. The x,y, and depth information is printed out. The second image shows the result of using depth information to remove the background and focus on a specific object.
Next week I plan to use these scripts in conjunction with the edge and laser detection algorithms I have written, so that the robot can use that information to navigate.