This week I worked on a few tasks. First, I worked with my teammates to complete the design presentation. We had to reevaluate some of our requirements and solution approaches for the presentation. We also discussed our solution approach in detail and researched how each component would connect to other components.
I also received the Intel RealSense camera from Tao this week, and spent some time trying to set it up. I was able to get it connected to my laptop and using a VM, I am able to access the camera. The next step is to setup the camera in the Intel RealSense Viewer. I have been attempting to get the camera setup in the viewer, but the viewer crashes whenever I open it, so I will need to debug that this week.
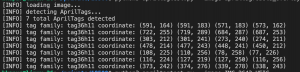
I also worked on the April tag detection code. As I mentioned last week April tag code is originally in Java/C so I followed some tutorials online in Python, which I am most familiar with, to get the software setup. Currently I am able to draw a bounding box around the April tag, detect the specific family the tag is from, and output the exact coordinates of the tag in the image. My next steps are to combine this with the data that I would receive from the camera to output the exact location of the April tag so the robot can navigate to it. I hope to do that next week.
Example image/output: