Echo & Page
Implemented a script on the Raspberry Pi and achieved communication between the back end of the web application and the Raspberry Pi. The Raspberry Pi now will receive a message from the back end at user specified alarm time. It will also receive and play the user specified ringtone after activation.
Implemented wall detection in our final script. The robot will halt and get ready for the next request from the server after detecting a wall based on our own algorithms.
A portable power supply is tested to be working and we are now able to put everything onto the robot and start final optimization and testing.
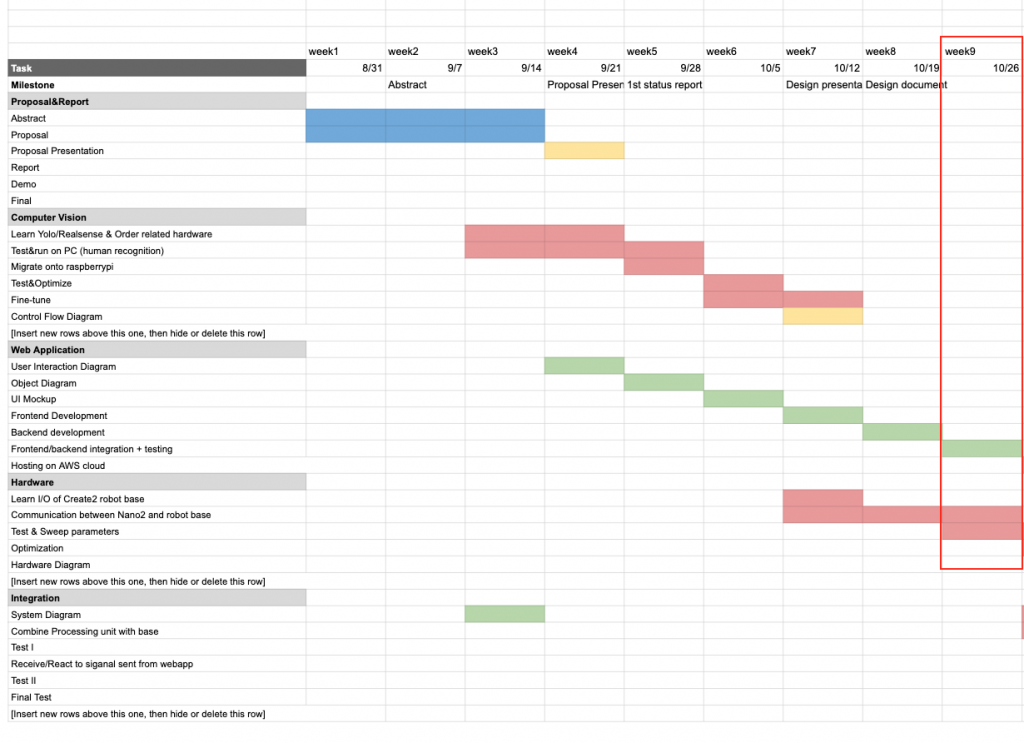
We are on schedule.
Yuhan
This week(week of 11/9 – 11/15):
- prepared for interim demo on Wednesday
- cleared and prepared sample alarm and schedule data
- deployed current implementation to EC2(Ubuntu)
- tested code snippet on Pi
- supported Echo and Peizhi in the integration of the code snippet into the main program running on Pi
- set up access for Echo and Peizhi for easier debugging
Next week(week of 11/16 – 11/22):
- continue testing communication between Pi and web app
- modify communication code snippet on RPi so it writes to files instead of printing to stdout(to keep a record of messages & when they are received, to validate reliability of the alarm scheduling)
- implement alarm and ringtone deletion
- research on and implement database change
I am on schedule.
Problems: refer to personal update.