Risk and Plans
1. Compatibility and Availability of parts:
This is a major risk for the project at this time because the parts are the foundation of the project. The risk lies in the discrepancies between the advertisement online and the actual product. If the product comes in as not what we are expecting, this could cause delays to our schedule and alter our plans.
We are mitigating these risks by asking people who are familiar with the parts that we are looking for, hoping for a more accurate review. We also plan to order more quantity than needed for each component in case there are manufacturing issues. In addition to the parts that we want, we also have several backup plans that we can order quickly.
2. Integration:
We need to make sure that each part that we plan will integrate properly with others. It might look good on paper, but the actual integration of HW and SW is challenging. We risk taking longer than expected time to solve those issues. These risks are managed by having slack time to troubleshoot the issue.
Changes in Design
- No more 9V battery pack, use normal power bank instead since most of our components use 5V
- Benefits:
- Eliminates need for DC voltage converter
- Easier to find off the shelf parts, or people can just use their own power bank
- Drawbacks:
- Need to design our own tail light to fit 5V power source
- Benefits:
- Settled on RPi 4 for main embedded system
- We felt that the performance uplift of the RPi 5 (2 – 3x) was unnecessary for our project when the RPi 4 might provide enough performance at a lower power draw (both idle, under load, and peak power usage)
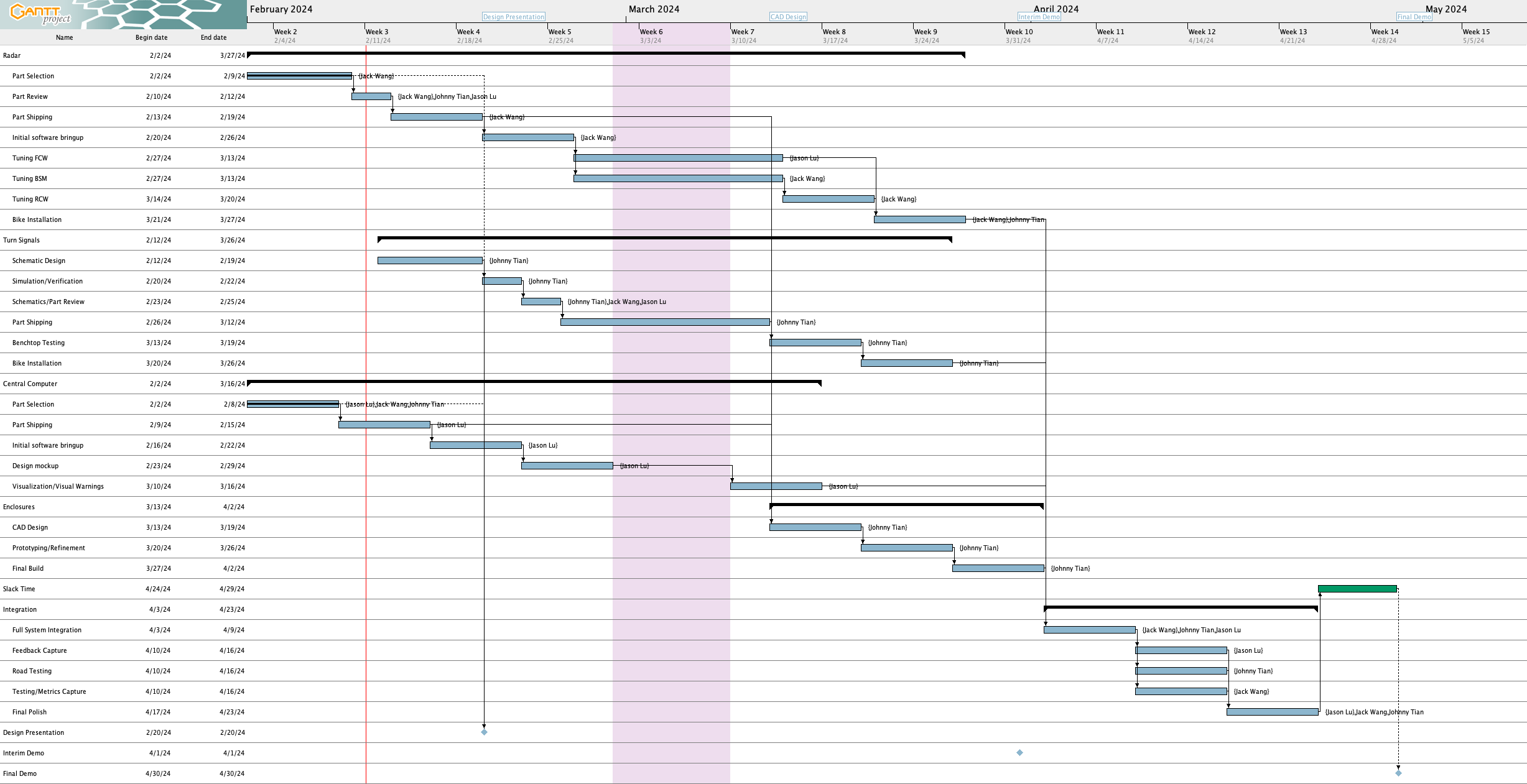
Schedule Updates
There as been an adjustment to the start date from 02/02 to 02/12 for the turn signal schematic design to give Johnny more time to work on it. This pushes back the start of the CAD design for the enclosures which in turn pushes back the integration date and reduces our slack time to .
We are exploring whether we can do the enclosure design in parallel with the turn signal design so we can move the integration date back up again.
Here is the updated schedule:
Documents
https://docs.google.com/document/d/1qXdcfVPIODVeR-x2SSulSoF8A1yPflvq7Hq1ibca5z0/edit