What did you personally accomplish this week on the project?
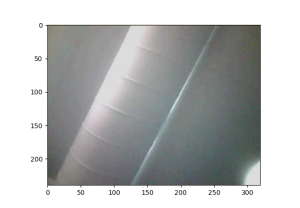
For this week, I wrote a python script that would simulate the central node’s function so I could test the Wi-Fi link for stability. The script will listen for an incoming packet and then perform the needed decompression steps before it displays it as a live video feed. The script also allowed me to explore the limits of the current Wi-Fi systems by adjusting the stream quality to see at what level we start seeing dropped frames. I found that the Wi-Fi is robust enough to support the encoder running at nearly the highest quality without significant frame drops.
In addition, we also switched the antenna jumpers on the ESP over to the external IPEX connector. This is so that I can use an external patch antenna for better transmission quality. Previously, I was just using the built-in PCB antenna which is suboptimal since it is so small and limited by the PCB area. With this new external antenna, I was able to get about 30 meters of range while maintaining a good video feed. The test was performed indoors with a noisy RF environment and in a non-line of sight situation with two brick walls between the receiver and the transmitter. I’d expect this number to increase significantly when I run this test outdoors and in a line-of-sight environment. The current patch antenna that we have on it is a 3dBi omnidirectional one. This can always be switched out to a antenna with higher gain if we need better performance
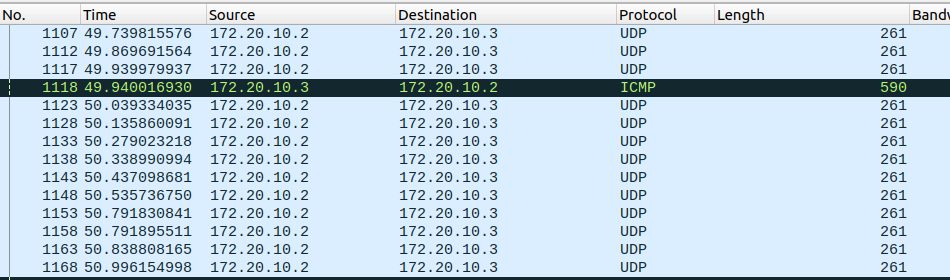
The final thing that I was able to get done this week was verify that I could connect to the receiving ESP32 and have it read valid data. There were a few things that had to be fixed on the receiving side which was mainly to enable IPv4 fragment reconstruction. Fragment reconstruction is needed since the packet size exceeds that of Wi-Fi MTU of around 1550 bytes.
Link to video of streaming python script: https://drive.google.com/file/d/1OHjypw3lSpivNJLjFea4oVtCaHKOl_wL/view?usp=sharing
Is your progress on schedule or behind? If you are behind, what actions will be
taken to catch up to the project schedule?
Currently on schedule
What deliverables do you hope to complete in the next week?
For next week, I hope to run the range test outdoors to verify my assumptions