This week, I worked on integrating the RPi GPIO outputs with the physical circuitry by attaching them to the gates of each MOSFET. A video of the chromatic scale that we showed in a previous status report being played on the solenoids can be found here
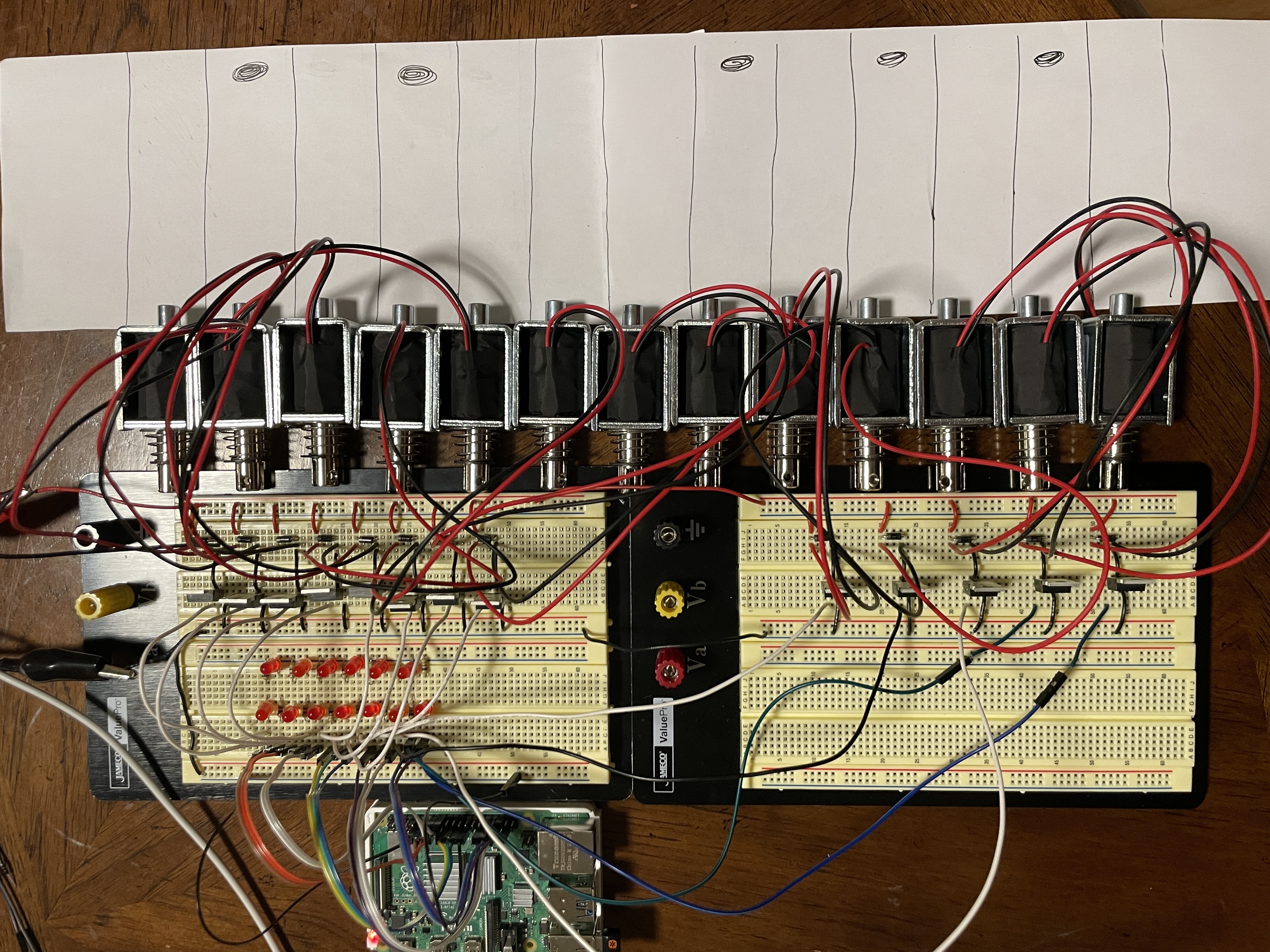
One thing we have not mentioned so far is that, from the rough piano layout seen on the paper, you can see there is an extra solenoid between the E and F spaces. This solenoid is placed in the area where there would be a black key in between the white keys. Another will be placed between the B and C spaces. This part of the design is so that we are able to move the accompanyBot up and down the scale. Since different starting keys of the octave will require different orders of black and white keys, we will just remap the solenoids to the correct keys. Thus we will be able to play more contiguous notes for certain melodies that do not start on a C. The downside of this design is that at any given time, two of the solenoids will be useless. However, the solenoids must be arranged like this if we do not want to have the user have to move the solenoids themselves each time they adjust the starting position.
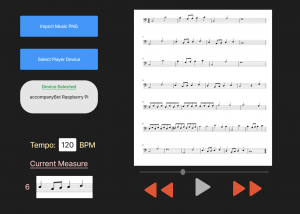
To make the pin mapping more modularized, I have written functions that change the dictionary that maps the notes to pins based on the starting note passed into the function. This will allow the user to place the accompanyBot at different spots on the keyboard.
I also added additional XML files that can help in testing the tempo and the case where the piece tries to play more than five keys at a time
So far, I am on schedule according to the Gantt chart, although tomorrow I will need to add support for chords since they are not supported in the current implementation due to the fact that I did not realize they are a different data structure in the music21 library.
In the next week, I will work on making the process for playing a piece more streamlined since at the moment, I must manually change the files and rerun the code every time I want to switch the piece. I will also work with Rahul on accepting the user inputs to start and stop.