
Heading into the final weeks of the semester, and thus this project, I have run one primary test for my part of the project, and that was ensuring the power consumption of the circuitry does not exceed 60 W. This goal has been met since we limited the number of solenoids that can be turned on at once to five, since each solenoid draws about 0.9 A and uses 12 V this requirement has been met and tested. Additionally, if this proves to be troublesome in the coming weeks, the voltage can be lowered, reducing the current since each solenoid doe not need 12 V to operate. I will also be helping measure our maximum tempo since the circuit will be a limiting factor due to its physical characteristics. Hopefully, we will be able to meet our preset quantity, but that is probably unlikely.
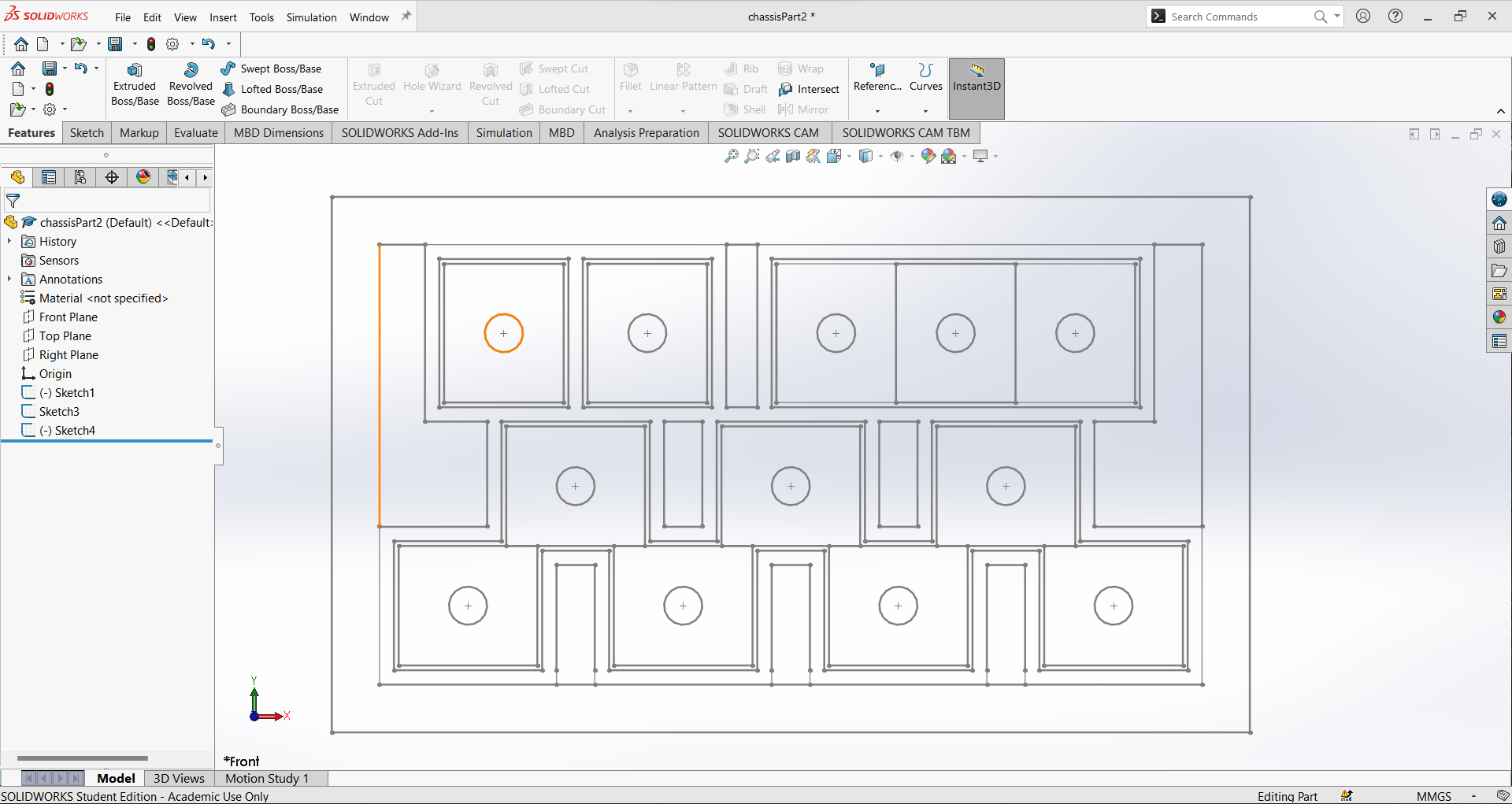
In addition to the interim demo, the image above is what I have accomplished this week. I realized that there were a couple of issues with the previous version of the chassis design. One of the major issues was that the black and white keys were not actually aligned properly in my previous design. Another major issue was that we wanted to allow the system to be placed over any octave on the keyboard, but after some more careful measurements, I realized this would not be possible for what we had in mind, so I had to redesign the chassis nearly from scratch. Additionally, the previous design was under the assumption that we would just secure the solenoids to the inside of the chassis, but to plan for problems arising for demo day, we switched to a design that would allow for solenoids to be replaced easily. Overall, I believe this is a much more robust and easy-to-use design, and hopefully, it will be suitable for demo day.
I am still technically on track, but I would’ve liked to 3D print a prototype tomorrow, and I’m not sure if I will be able to since I am currently having difficulties with Solidworks right now. Hopefully, I will be able to figure out my problem with enough time to 3D print tomorrow, but if I don’t, I will try to print something out Monday. I hope I can print it out tomorrow, though.
Next week I hope to have a prototype of the chassis completed, and if it does not function properly, I hope to update the design and print another one before the week ends. The end of the semester is coming soon, so I need to finish this by the end of next week.


