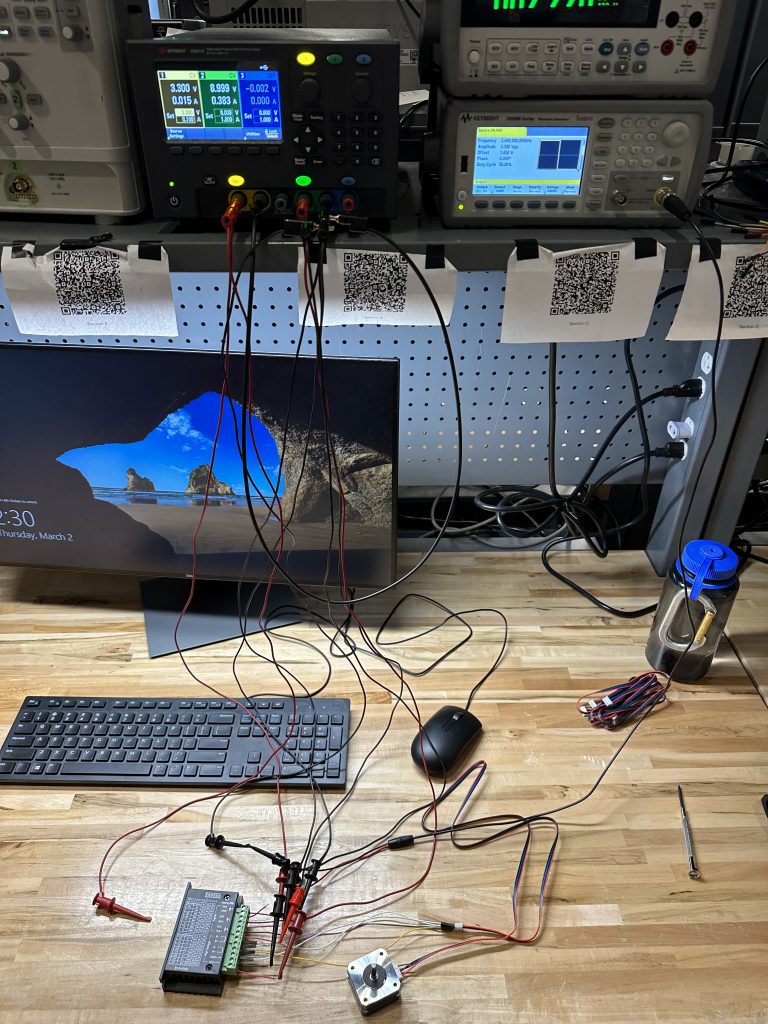
This week, I spent time making the breadboard circuit used by the GPIO interface more robust, as well as working with Jack to find the best Jetson pins to use for PULse, DIRection, and ENAble lines on the two stepper drivers. We found that many of the pins, either on the header we soldered to or themselves were shorted/acting as a voltage divider.
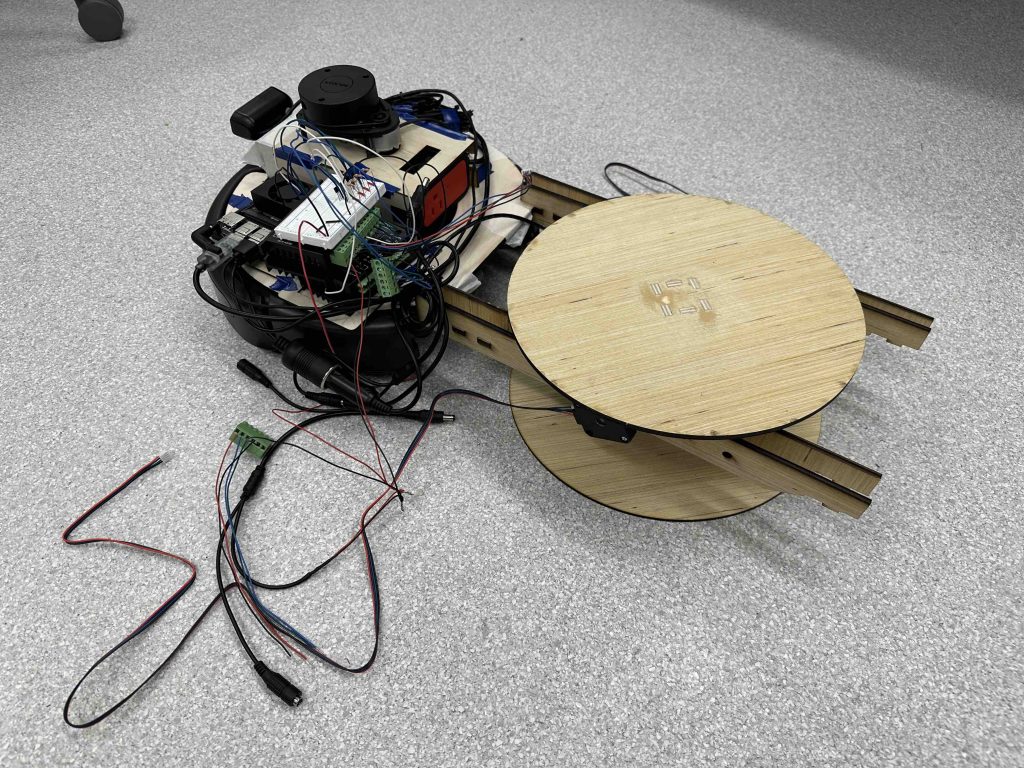
The lift system is now functional and can lift at least an empty bin. I also developed a startup procedure for the stepper drivers to prevent an overcurrent on the battery, which causes it to shut down.
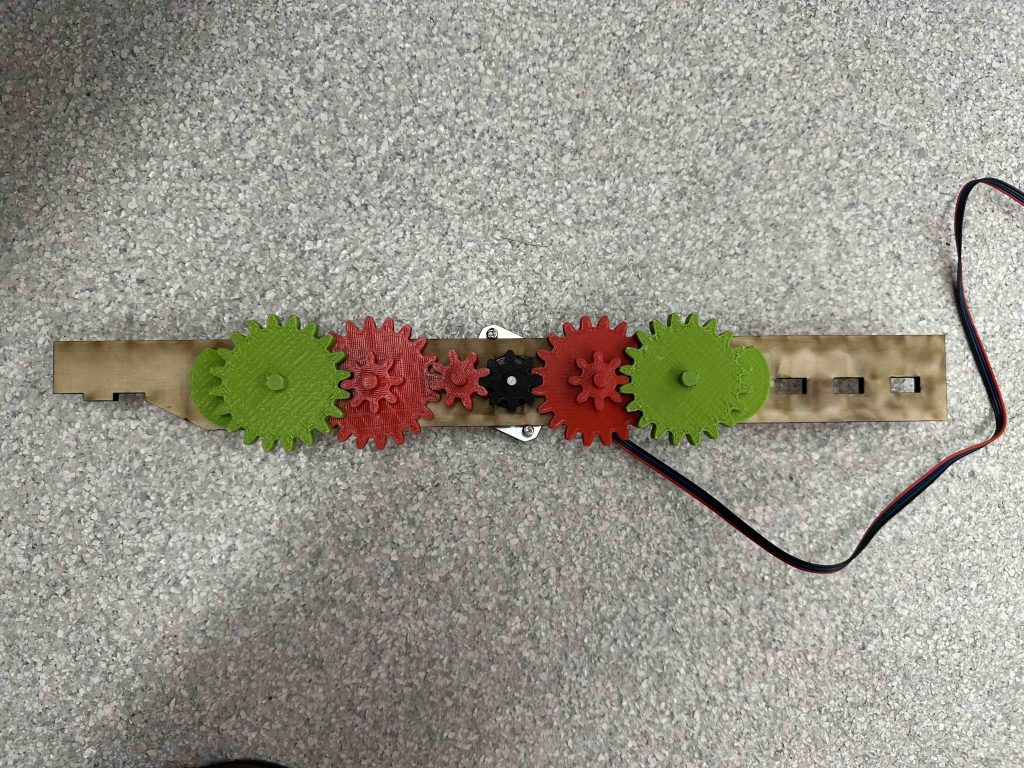
I prepared for a hardware freeze as best as possible while allowing Jack and George to test the docking alignment, including sanding down gears and arms and drilling mount holes.
My personal progress is finally on track, with the hardware freeze occurring tomorrow afternoon. This will allow the glue to set enough overnight for us to begin final integration tests on Monday. After the freeze, I will jump over to the software side of the project and start helping with any debugging or integration issues that arise.

I wanted to insert a lift test video but it’s blocked by WordPress 🙁