This week I worked primarily on getting a second set of lift arms made, as well as debugging the Jetson GPIO motor issue. I issued the design change for the lift arms to be higher off the ground, allowing for more deviation in the floor surface and wheels at the ends for precise height.
Previously, I was able to drive the stepper motor from GPIO using only a MOS on the pulse wire, but now that’s not functional so I’m moving to use MOS’s on every wire into the stepper drivers. This should alleviate the current load on the Jetson pin header and prevent the brownout we were seeing.
I also created the wiring harness that allows us to plug the stepper drivers directly into the 12V DC output of the battery for our final version. There appear to be no issues with getting enough current into the motors.
I’m taking a break from motor debug to write this report, which I plan to have functional by tonight. After that, we’ll be ready to start docking tests. This puts us closer to being on schedule, but we’ll utilize finals week as our slack time for more extensive testing and system tuning.
This week, it’d be great to be in a place where I can go ahead and glue our arms down, since that action would mean we can no longer swap out gears or motors, and the arms are in the final iteration. Once I freeze the hardware, I’ll support Jack and George on the software sensing/hardware interface for our testing.
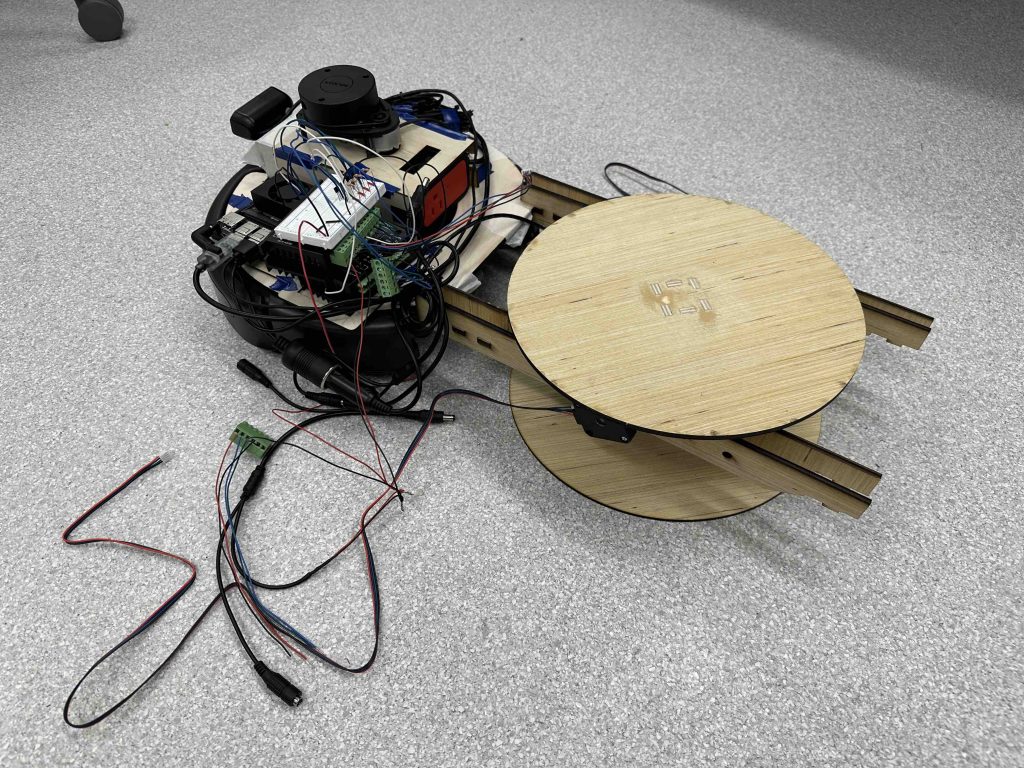
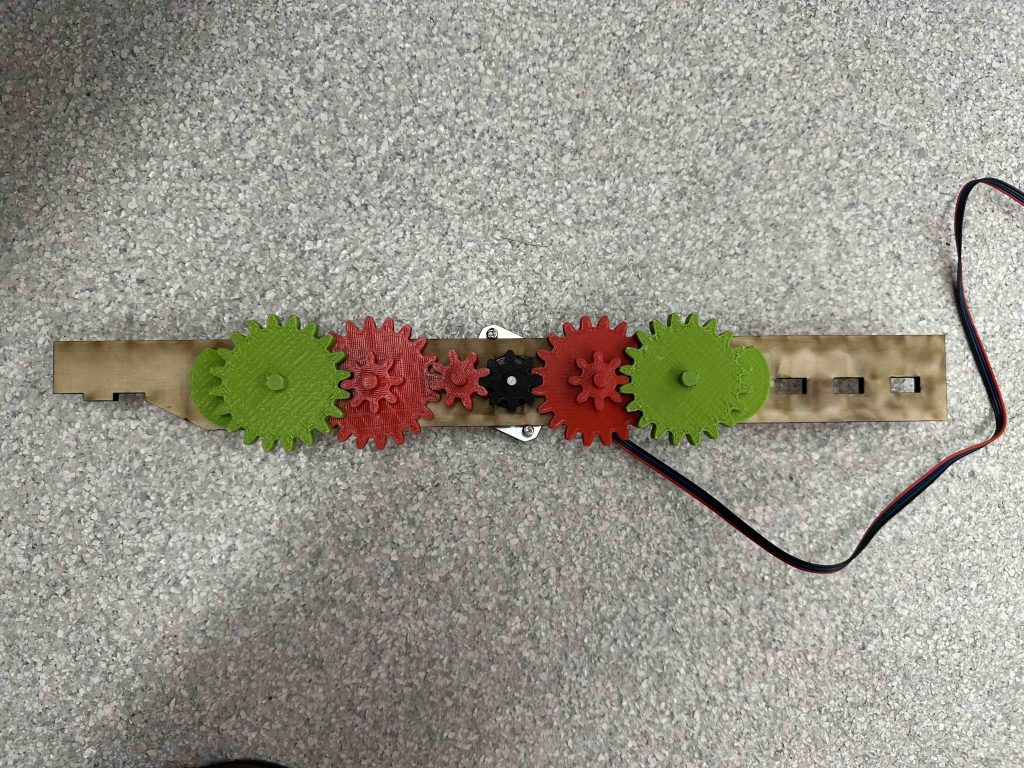
See below: the new higher arms with the bin platform, side-on view of the gears mounted on one of the arms (green ones are new, high gear ratio)