
Zach’s Status Report for 4/29/23
This week, I spent time making the breadboard circuit used by the GPIO interface more robust, as well as working with Jack to find the best Jetson pins to use for PULse, DIRection, and ENAble lines on the two stepper drivers. We found that many of the pins, either on the header we soldered to or themselves were shorted/acting as a voltage divider.
The lift system is now functional and can lift at least an empty bin. I also developed a startup procedure for the stepper drivers to prevent an overcurrent on the battery, which causes it to shut down.
I prepared for a hardware freeze as best as possible while allowing Jack and George to test the docking alignment, including sanding down gears and arms and drilling mount holes.
My personal progress is finally on track, with the hardware freeze occurring tomorrow afternoon. This will allow the glue to set enough overnight for us to begin final integration tests on Monday. After the freeze, I will jump over to the software side of the project and start helping with any debugging or integration issues that arise.

I wanted to insert a lift test video but it’s blocked by WordPress 🙁
Zach’s Status Report for 4/22/23
This week I worked primarily on getting a second set of lift arms made, as well as debugging the Jetson GPIO motor issue. I issued the design change for the lift arms to be higher off the ground, allowing for more deviation in the floor surface and wheels at the ends for precise height.
Previously, I was able to drive the stepper motor from GPIO using only a MOS on the pulse wire, but now that’s not functional so I’m moving to use MOS’s on every wire into the stepper drivers. This should alleviate the current load on the Jetson pin header and prevent the brownout we were seeing.
I also created the wiring harness that allows us to plug the stepper drivers directly into the 12V DC output of the battery for our final version. There appear to be no issues with getting enough current into the motors.
I’m taking a break from motor debug to write this report, which I plan to have functional by tonight. After that, we’ll be ready to start docking tests. This puts us closer to being on schedule, but we’ll utilize finals week as our slack time for more extensive testing and system tuning.
This week, it’d be great to be in a place where I can go ahead and glue our arms down, since that action would mean we can no longer swap out gears or motors, and the arms are in the final iteration. Once I freeze the hardware, I’ll support Jack and George on the software sensing/hardware interface for our testing.
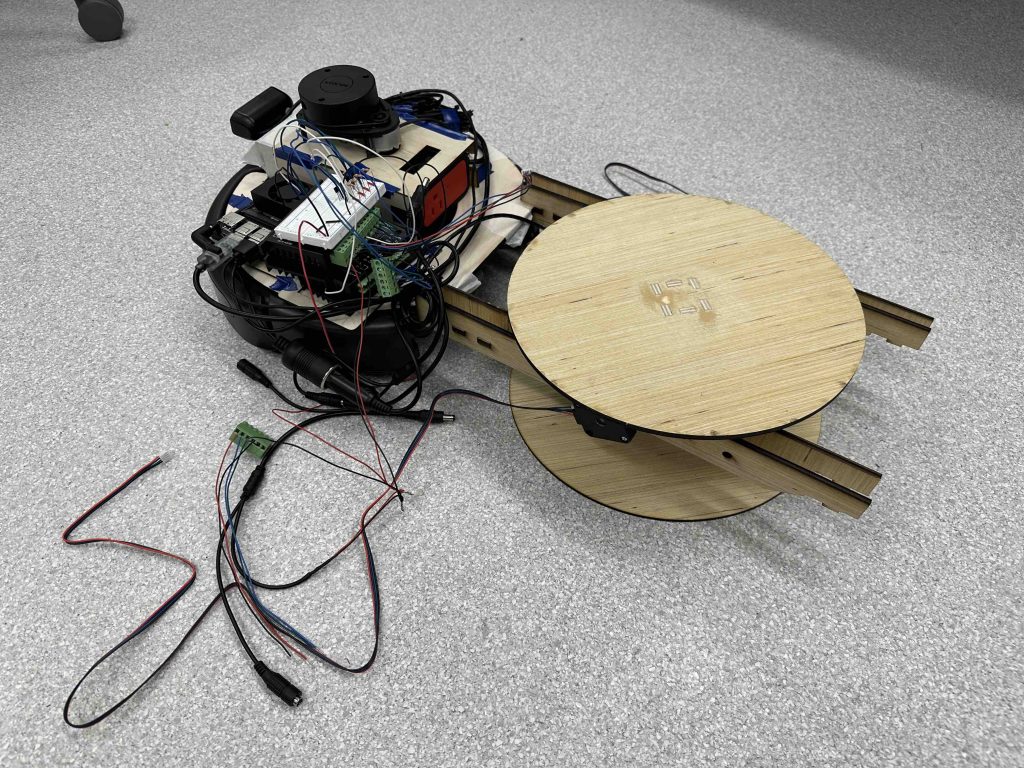
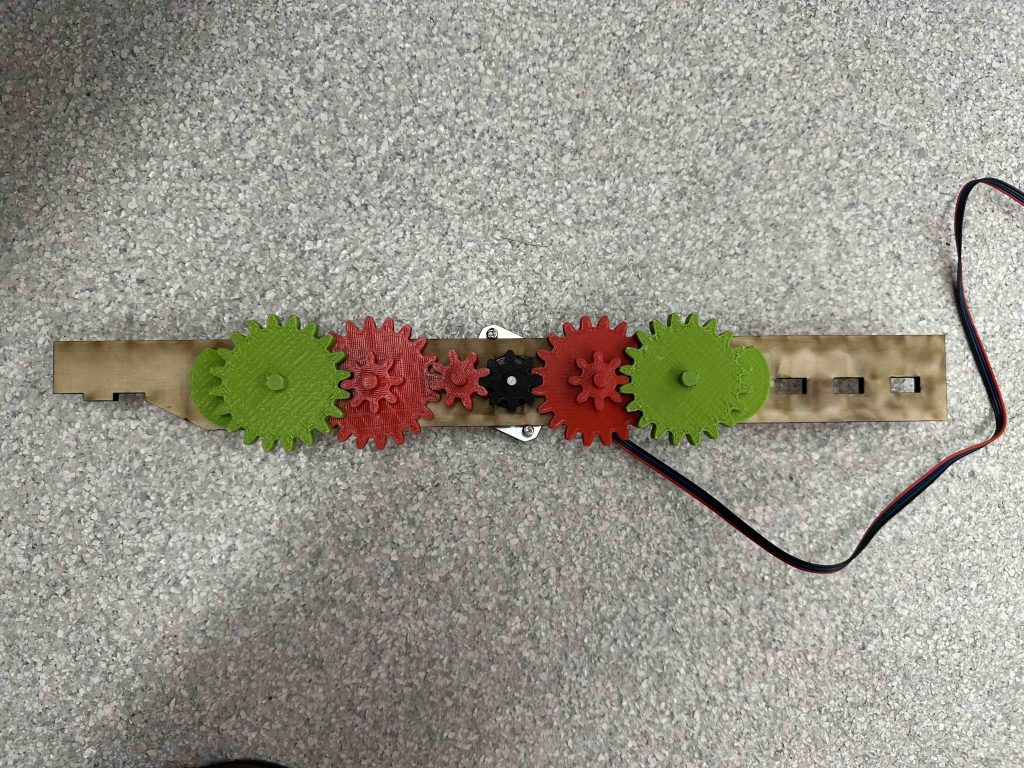
See below: the new higher arms with the bin platform, side-on view of the gears mounted on one of the arms (green ones are new, high gear ratio)
Zach’s Status Report for 4/8/2023
This week I helped with the assembly and setup for the interim demo, including doing some final laser cutting. I also was able to get the full gear system for a single arm put together, after some delays with the 3D print orders. I spent a lot of time trying to figure out why the stepper motor wasn’t being driven properly, which ended up being multiple reasons. The drive strength on the GPIO is pretty poor, and one of the Jetson’s PWM pins doesn’t work properly.
I am on schedule, and just need to redesign the battery housing since the orientation of the battery status window is on the wrong side. Other than that, I’m ready for assembly of the housing and testing of the lift arms. Based on initial results I may need to use larger gear ratios since the torque output is lower than I had hoped, but will try and alter the stepper config first. This will only impact the weight limit tests that we’ll do in a couple weeks.
In the next week I’ll try and improve the lift arm strength and remake components if needed, followed by a full glue-up of the electronics shield. I’ll also start making the bin modifications so we can begin weight testing. Once that’s done, I’ll begin moving over to the software side and assist there.
I’ve run validation tests on the lift arms and gear systems so far, which will allow me to start doing higher weight verification tests up to 10lbs. After the bins get made this week, I’ll be able to verify stability of the bin lift to meet the 99% no-tip target. Those are the only tests I have that are strictly hardware-related, and the other ones will be integration tests with the software side. I’ll work closely with Jack and George on those tests and the associated metrics.
https://github.com/gxgao/eceCapstone/blob/master/lift_test1.py

Team Status Report for 4/1/2023
Significant Risks
- Battery life: we’re currently not seeing the expected longevity from the single pack, so may have to go to 2 packs in parallel
- Navigation Stack compiles and runs, moving on to tuning configuration parameters and sensor data for more accurate results with path planning and movement
Design Changes
- None to report on hardware side
- We have updated the Roomba library and changed the serial baud rate. This has enabled the odom topic in ROS. Seems to be good enough to get basic path planning working, but needs more testing.
Schedule/PM
- Slightly behind on test/integration, will be making use of 2 week slack time
We do have some photos to add, but sadly wordpress isn’t allowing uploads 🙁
Zach’s Status Report for 4/1/2023
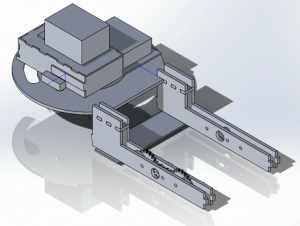
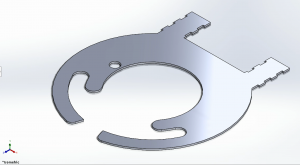
This week I made a decent amount of progress on both CAD and fabrication. I was able to finish out a preliminary model for our component shields and the lift arms, which I also started laser cutting. The gear-cam system also got printed, but I may do a reprint with a larger cam if the lift height isn’t adequate.
As for schedule, I’m catching up quickly by getting everything made, but the true mark will be after the interim demo. I think we’re going to utilize the 2-week slack time for further integration and testing, which allows for redesigns of the lift arms.
In the next week, I’ll have the component shields cut, as well as perform any necessary iteration on the lift arms in terms of height and length. If all goes well in this area this week, I’ll start shifting more towards software and integration of different modules with Jack and George.
I have photos of the assembly and CAD models to add, but WordPress is having issues 🙁
Zach’s Status Report for 3/25/2023
This week, I had some unforeseen events not related to our project that meant I spent less time than planned. Specifically, I wasn’t able to fabricate the lift arms, but made some progress on coming up with a design for our electronics shield. For testing the LiDAR mapping, I had to come up with a temporary solution to mount all the electronics, which ended up being some wire to fasten the battery, Jetson, and LiDAR in place.
I also helped with some of the LiDAR mapping and interfacing with the Roomba.
In lieu of this, I’m again behind where I’d like to be, but unless unforeseen events come up this week I have far more availability than this last to perform fabrication. Specifically, I’d like to get the electronics shield made in addition to the lift arms. I already have CAD models for the bin modification so making those will be a matter of laser cutting.
As for schedule with the interim demo, I plan to have the lift subsystem complete by the end of the week, including stepper motors and gears/cams. While I may not be at the stage to test auto-docking and lift, I can still showcase the lift system on its own. Other than that, the slack time will probably used for integration. After the hardware fabrication and verification is complete, I’ll probably move over to the software side since that’s where our main integration challenges lay.
Zach’s Status Report for 3/18/2023
This week I was able to CAD the mounting plate for our lift arms, and the lift arms themselves are in progress and will be done tomorrow. I tried to design them for high load capacity, since I’m not too sure about the strength of plywood. I also worked on some of the drive code using the pyCreate2 API, since that’s what we’ll be using for the full system, and supported making our first map of HH 1307. roomba_v1.py

I’m still a little behind schedule with the CAD, but have been making good progress to catch up. I’ll be working hard to iterate the design if needed, but the CAD models for the arms are simpler than the top, which should help. Assembly will be rather quick as well, since I’m designing with notches and slots that fit well together.
This week’s target is to have bin docking done, which will be on schedule if I can complete the bin arms in the first half or two-thirds of the week. Not sure if docking will be able to occur using CV, but I can always test with a remote connection to the Jetson to make sure all mechanisms are working.
Team Status Report for 3/18/2023
Significant Risks
- LiDAR mapping
- When we attempted mapping HH1307, the system had trouble with recognizing windows as walls. While mapping we used tethered driving, which required us moving behinds the robot, so we may have impacted the accuracy of the map. Now that we have tele-op functionally working, we will attempt mapping again. Additionally, we will also setup our backup LiDAR system (RealSense L515) to see if it has similar issues.
- Bin CV with movement
- Ros Navigation Stack Setup
- Need to attempt setting up navigation, but this is limited by our understanding of ROS. Additionally, navigation is limited by the map quality produced by SLAM, so mapping is a hard dependency as of now.
Design Changes
No design changes were made, but we did buy a USB network adapter so we can connect to the Jetson wirelessly if using the AGX. This will allow us to remote access for debug, monitoring, and tele-op for driving, map creation.
Photos

Zach’s Status Report for 3/4/2023
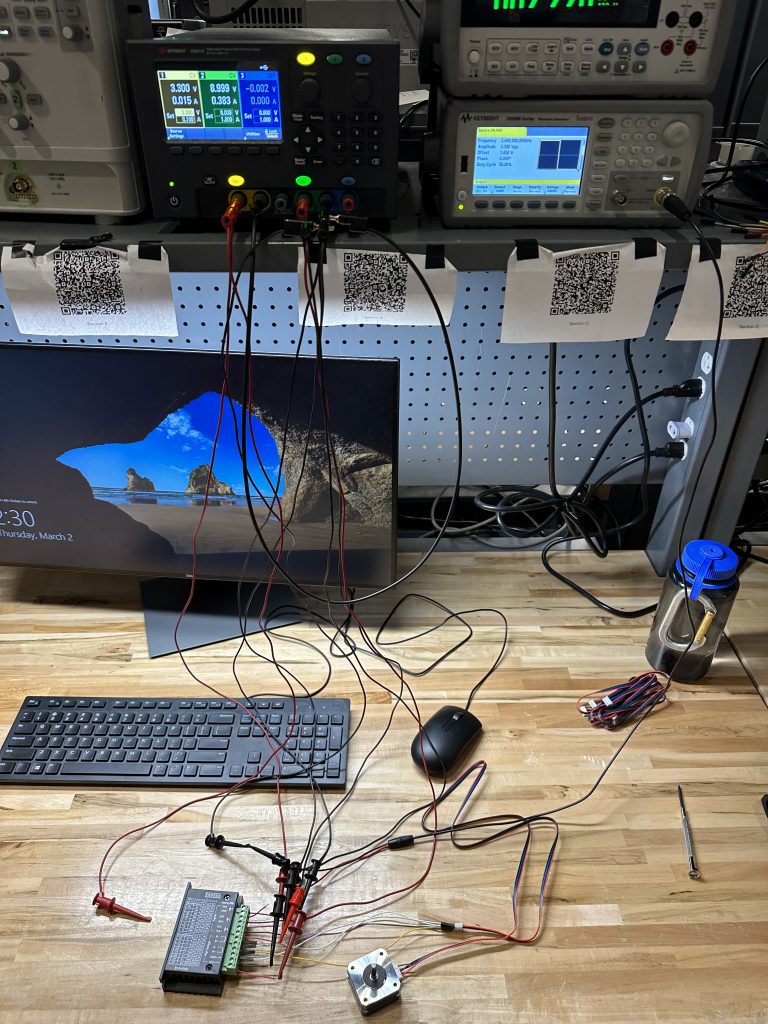
This week I spent most of my time on the design report linked below, since we wanted to make it quite thorough. That took more time than expected due to Google docs formatting issues. I benchmarked the stepper motor’s current draw and best pulse frequency across various micro step configurations. I also created the CAD model for the cam for the lift system.

I’m still slightly behind on CAD modeling and fabrication, but slack time this week and having the design report complete will allow me to get everything made. It was also tough because I wasn’t in Pittsburgh for break so couldn’t prototype designs in TechSpark.
This upcoming week I will be spending a lot of time in TechSpark getting parts laser-cut and start assembling onto the Roomba. There could be delays here based on fastener availability, but I can find quick, temporary workarounds for those to allow for rapid prototyping.