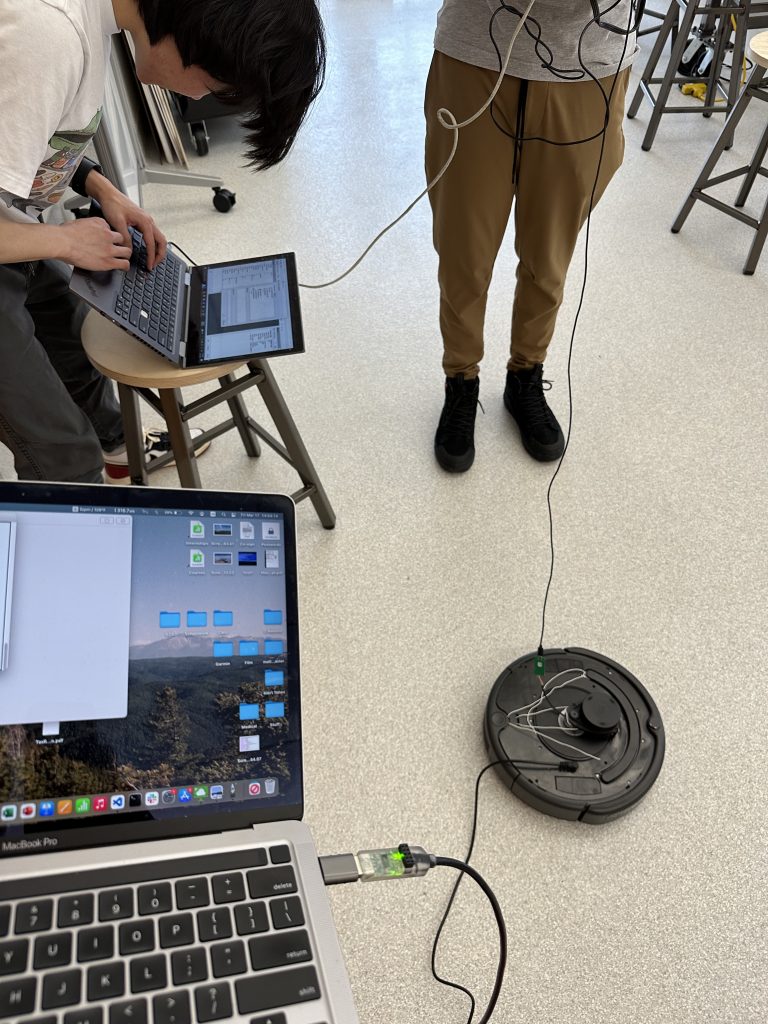
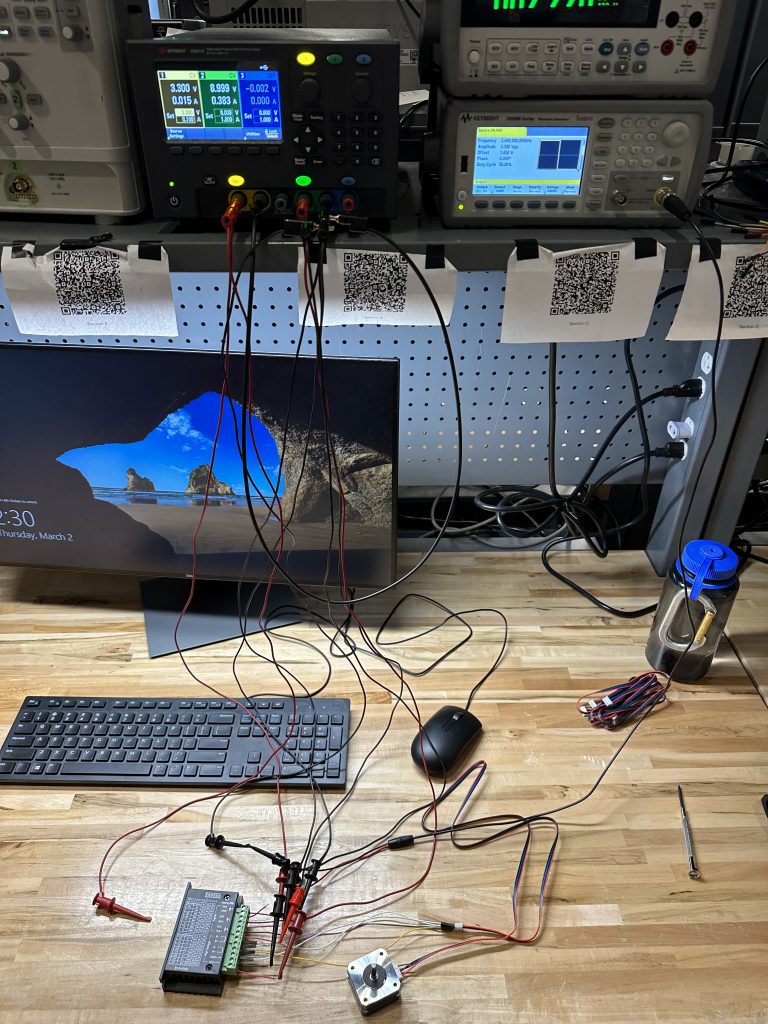
This week, I had some unforeseen events not related to our project that meant I spent less time than planned. Specifically, I wasn’t able to fabricate the lift arms, but made some progress on coming up with a design for our electronics shield. For testing the LiDAR mapping, I had to come up with a temporary solution to mount all the electronics, which ended up being some wire to fasten the battery, Jetson, and LiDAR in place.
I also helped with some of the LiDAR mapping and interfacing with the Roomba.
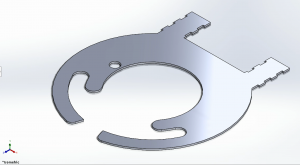
In lieu of this, I’m again behind where I’d like to be, but unless unforeseen events come up this week I have far more availability than this last to perform fabrication. Specifically, I’d like to get the electronics shield made in addition to the lift arms. I already have CAD models for the bin modification so making those will be a matter of laser cutting.
As for schedule with the interim demo, I plan to have the lift subsystem complete by the end of the week, including stepper motors and gears/cams. While I may not be at the stage to test auto-docking and lift, I can still showcase the lift system on its own. Other than that, the slack time will probably used for integration. After the hardware fabrication and verification is complete, I’ll probably move over to the software side since that’s where our main integration challenges lay.