- Worked with Jack to get create dummy_laser node
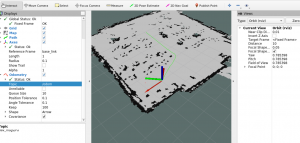
- Created bin identification algorithm that uses edge detection to identify bin from laser data
- Identify bin using L1 norm during bin rotation through lidar scan window
- Worked with Jack to calibrate docking procedure
- Experimented with lidar bin identification (dummy_laser), and were unhappy with results
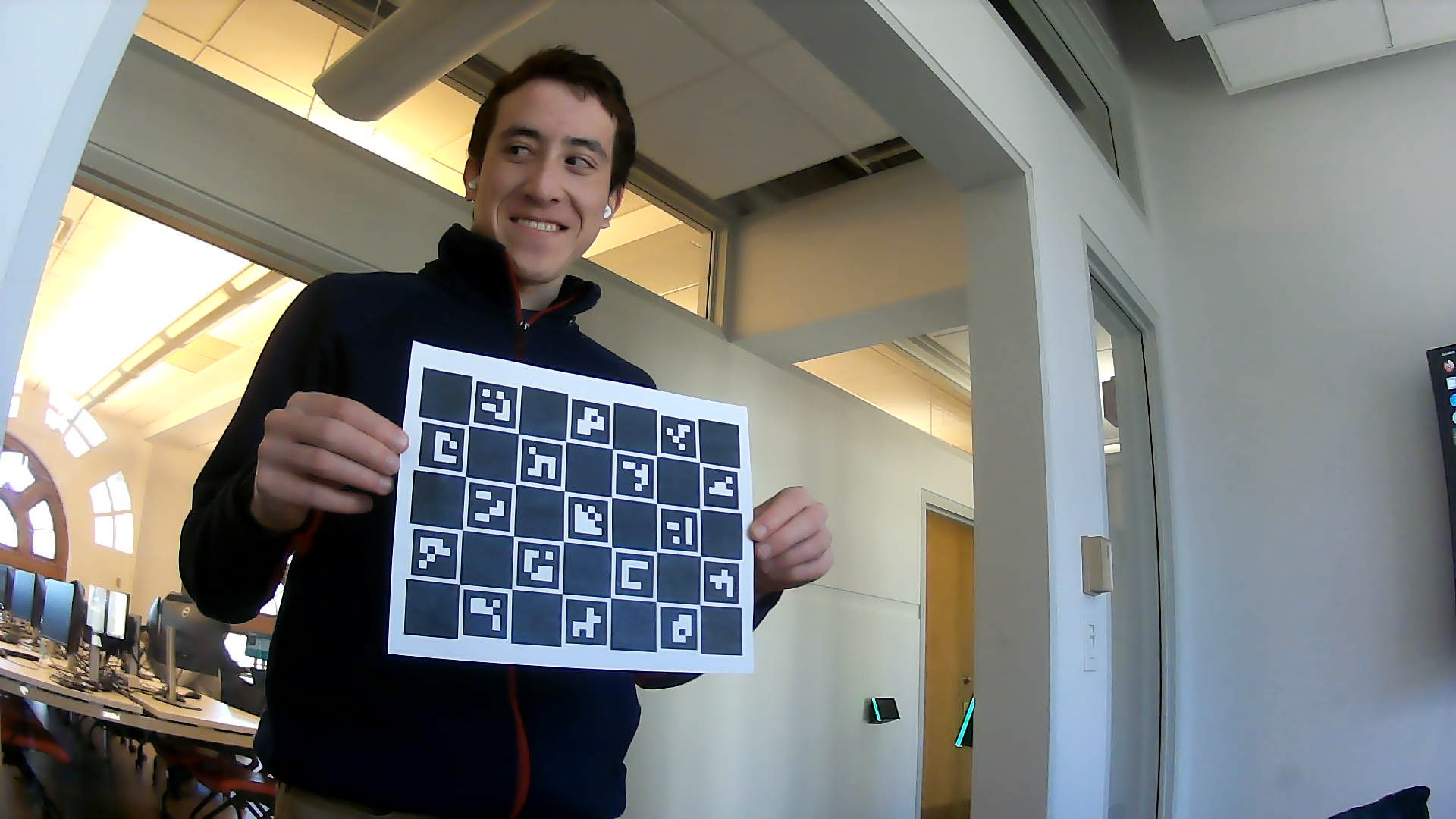
- Added support for second back camera to also detect ARuco tags
- Docking procedure uses a mix of ARuco and Lidar distance estimation to control movement logic
- Added additional state-machine logic for docking protocol
- Worked with Jack to make rotation direct drive commands more robust
- Uses transform listener as a feedback loop to get back robot position w.r.t the map
- Rotate algorithm rotates to goal angle using current published position
Schedule:
Behind on schedule, using finals week for full integration testing and integration
Next week:
Finish bin docking integration test, complete the rest of the state machine logic
Testing Plans:
- Worked with jack on preliminary bin alignment for bin docking subsystem test
- Changed design to include 2nd web cam after finding lidar object detection being unreliable
- More robust docking test with arms to lift bins are needed
- Integration testing left for next week after hardware freeze is done
- Completed another battery lifetime test 80% battery drainage over 4 hours.